+#endif
+#include "ESPAsyncWebServer.h"
+
+DNSServer dnsServer;
+AsyncWebServer server(80);
+
+class CaptiveRequestHandler : public AsyncWebHandler {
+public:
+ CaptiveRequestHandler() {}
+ virtual ~CaptiveRequestHandler() {}
+
+ bool canHandle(AsyncWebServerRequest *request){
+ //request->addInterestingHeader("ANY");
+ return true;
+ }
+
+ void handleRequest(AsyncWebServerRequest *request) {
+ AsyncResponseStream *response = request->beginResponseStream("text/html");
+ response->print("Captive Portal");
+ response->print("This is out captive portal front page.
");
+ response->printf("You were trying to reach: http://%s%s
", request->host().c_str(), request->url().c_str());
+ response->printf("Try opening this link instead
", WiFi.softAPIP().toString().c_str());
+ response->print("");
+ request->send(response);
+ }
+};
+
+
+void setup(){
+ //your other setup stuff...
+ WiFi.softAP("esp-captive");
+ dnsServer.start(53, "*", WiFi.softAPIP());
+ server.addHandler(new CaptiveRequestHandler()).setFilter(ON_AP_FILTER);//only when requested from AP
+ //more handlers...
+ server.begin();
+}
+
+void loop(){
+ dnsServer.processNextRequest();
+}
diff --git a/lib/libesp32/ESPAsyncWebServer/examples/ESP_AsyncFSBrowser/ESP_AsyncFSBrowser.ino b/lib/libesp32/ESPAsyncWebServer/examples/ESP_AsyncFSBrowser/ESP_AsyncFSBrowser.ino
new file mode 100644
index 000000000..bf42d0038
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/examples/ESP_AsyncFSBrowser/ESP_AsyncFSBrowser.ino
@@ -0,0 +1,221 @@
+#include
+#ifdef ESP32
+#include
+#include
+#include
+#include
+#include
+#elif defined(ESP8266)
+#include
+#include
+#include
+#endif
+#include
+#include
+
+// SKETCH BEGIN
+AsyncWebServer server(80);
+AsyncWebSocket ws("/ws");
+AsyncEventSource events("/events");
+
+void onWsEvent(AsyncWebSocket * server, AsyncWebSocketClient * client, AwsEventType type, void * arg, uint8_t *data, size_t len){
+ if(type == WS_EVT_CONNECT){
+ Serial.printf("ws[%s][%u] connect\n", server->url(), client->id());
+ client->printf("Hello Client %u :)", client->id());
+ client->ping();
+ } else if(type == WS_EVT_DISCONNECT){
+ Serial.printf("ws[%s][%u] disconnect\n", server->url(), client->id());
+ } else if(type == WS_EVT_ERROR){
+ Serial.printf("ws[%s][%u] error(%u): %s\n", server->url(), client->id(), *((uint16_t*)arg), (char*)data);
+ } else if(type == WS_EVT_PONG){
+ Serial.printf("ws[%s][%u] pong[%u]: %s\n", server->url(), client->id(), len, (len)?(char*)data:"");
+ } else if(type == WS_EVT_DATA){
+ AwsFrameInfo * info = (AwsFrameInfo*)arg;
+ String msg = "";
+ if(info->final && info->index == 0 && info->len == len){
+ //the whole message is in a single frame and we got all of it's data
+ Serial.printf("ws[%s][%u] %s-message[%llu]: ", server->url(), client->id(), (info->opcode == WS_TEXT)?"text":"binary", info->len);
+
+ if(info->opcode == WS_TEXT){
+ for(size_t i=0; i < info->len; i++) {
+ msg += (char) data[i];
+ }
+ } else {
+ char buff[3];
+ for(size_t i=0; i < info->len; i++) {
+ sprintf(buff, "%02x ", (uint8_t) data[i]);
+ msg += buff ;
+ }
+ }
+ Serial.printf("%s\n",msg.c_str());
+
+ if(info->opcode == WS_TEXT)
+ client->text("I got your text message");
+ else
+ client->binary("I got your binary message");
+ } else {
+ //message is comprised of multiple frames or the frame is split into multiple packets
+ if(info->index == 0){
+ if(info->num == 0)
+ Serial.printf("ws[%s][%u] %s-message start\n", server->url(), client->id(), (info->message_opcode == WS_TEXT)?"text":"binary");
+ Serial.printf("ws[%s][%u] frame[%u] start[%llu]\n", server->url(), client->id(), info->num, info->len);
+ }
+
+ Serial.printf("ws[%s][%u] frame[%u] %s[%llu - %llu]: ", server->url(), client->id(), info->num, (info->message_opcode == WS_TEXT)?"text":"binary", info->index, info->index + len);
+
+ if(info->opcode == WS_TEXT){
+ for(size_t i=0; i < len; i++) {
+ msg += (char) data[i];
+ }
+ } else {
+ char buff[3];
+ for(size_t i=0; i < len; i++) {
+ sprintf(buff, "%02x ", (uint8_t) data[i]);
+ msg += buff ;
+ }
+ }
+ Serial.printf("%s\n",msg.c_str());
+
+ if((info->index + len) == info->len){
+ Serial.printf("ws[%s][%u] frame[%u] end[%llu]\n", server->url(), client->id(), info->num, info->len);
+ if(info->final){
+ Serial.printf("ws[%s][%u] %s-message end\n", server->url(), client->id(), (info->message_opcode == WS_TEXT)?"text":"binary");
+ if(info->message_opcode == WS_TEXT)
+ client->text("I got your text message");
+ else
+ client->binary("I got your binary message");
+ }
+ }
+ }
+ }
+}
+
+
+const char* ssid = "*******";
+const char* password = "*******";
+const char * hostName = "esp-async";
+const char* http_username = "admin";
+const char* http_password = "admin";
+
+void setup(){
+ Serial.begin(115200);
+ Serial.setDebugOutput(true);
+ WiFi.mode(WIFI_AP_STA);
+ WiFi.softAP(hostName);
+ WiFi.begin(ssid, password);
+ if (WiFi.waitForConnectResult() != WL_CONNECTED) {
+ Serial.printf("STA: Failed!\n");
+ WiFi.disconnect(false);
+ delay(1000);
+ WiFi.begin(ssid, password);
+ }
+
+ //Send OTA events to the browser
+ ArduinoOTA.onStart([]() { events.send("Update Start", "ota"); });
+ ArduinoOTA.onEnd([]() { events.send("Update End", "ota"); });
+ ArduinoOTA.onProgress([](unsigned int progress, unsigned int total) {
+ char p[32];
+ sprintf(p, "Progress: %u%%\n", (progress/(total/100)));
+ events.send(p, "ota");
+ });
+ ArduinoOTA.onError([](ota_error_t error) {
+ if(error == OTA_AUTH_ERROR) events.send("Auth Failed", "ota");
+ else if(error == OTA_BEGIN_ERROR) events.send("Begin Failed", "ota");
+ else if(error == OTA_CONNECT_ERROR) events.send("Connect Failed", "ota");
+ else if(error == OTA_RECEIVE_ERROR) events.send("Recieve Failed", "ota");
+ else if(error == OTA_END_ERROR) events.send("End Failed", "ota");
+ });
+ ArduinoOTA.setHostname(hostName);
+ ArduinoOTA.begin();
+
+ MDNS.addService("http","tcp",80);
+
+ SPIFFS.begin();
+
+ ws.onEvent(onWsEvent);
+ server.addHandler(&ws);
+
+ events.onConnect([](AsyncEventSourceClient *client){
+ client->send("hello!",NULL,millis(),1000);
+ });
+ server.addHandler(&events);
+
+#ifdef ESP32
+ server.addHandler(new SPIFFSEditor(SPIFFS, http_username,http_password));
+#elif defined(ESP8266)
+ server.addHandler(new SPIFFSEditor(http_username,http_password));
+#endif
+
+ server.on("/heap", HTTP_GET, [](AsyncWebServerRequest *request){
+ request->send(200, "text/plain", String(ESP.getFreeHeap()));
+ });
+
+ server.serveStatic("/", SPIFFS, "/").setDefaultFile("index.htm");
+
+ server.onNotFound([](AsyncWebServerRequest *request){
+ Serial.printf("NOT_FOUND: ");
+ if(request->method() == HTTP_GET)
+ Serial.printf("GET");
+ else if(request->method() == HTTP_POST)
+ Serial.printf("POST");
+ else if(request->method() == HTTP_DELETE)
+ Serial.printf("DELETE");
+ else if(request->method() == HTTP_PUT)
+ Serial.printf("PUT");
+ else if(request->method() == HTTP_PATCH)
+ Serial.printf("PATCH");
+ else if(request->method() == HTTP_HEAD)
+ Serial.printf("HEAD");
+ else if(request->method() == HTTP_OPTIONS)
+ Serial.printf("OPTIONS");
+ else
+ Serial.printf("UNKNOWN");
+ Serial.printf(" http://%s%s\n", request->host().c_str(), request->url().c_str());
+
+ if(request->contentLength()){
+ Serial.printf("_CONTENT_TYPE: %s\n", request->contentType().c_str());
+ Serial.printf("_CONTENT_LENGTH: %u\n", request->contentLength());
+ }
+
+ int headers = request->headers();
+ int i;
+ for(i=0;igetHeader(i);
+ Serial.printf("_HEADER[%s]: %s\n", h->name().c_str(), h->value().c_str());
+ }
+
+ int params = request->params();
+ for(i=0;igetParam(i);
+ if(p->isFile()){
+ Serial.printf("_FILE[%s]: %s, size: %u\n", p->name().c_str(), p->value().c_str(), p->size());
+ } else if(p->isPost()){
+ Serial.printf("_POST[%s]: %s\n", p->name().c_str(), p->value().c_str());
+ } else {
+ Serial.printf("_GET[%s]: %s\n", p->name().c_str(), p->value().c_str());
+ }
+ }
+
+ request->send(404);
+ });
+ server.onFileUpload([](AsyncWebServerRequest *request, const String& filename, size_t index, uint8_t *data, size_t len, bool final){
+ if(!index)
+ Serial.printf("UploadStart: %s\n", filename.c_str());
+ Serial.printf("%s", (const char*)data);
+ if(final)
+ Serial.printf("UploadEnd: %s (%u)\n", filename.c_str(), index+len);
+ });
+ server.onRequestBody([](AsyncWebServerRequest *request, uint8_t *data, size_t len, size_t index, size_t total){
+ if(!index)
+ Serial.printf("BodyStart: %u\n", total);
+ Serial.printf("%s", (const char*)data);
+ if(index + len == total)
+ Serial.printf("BodyEnd: %u\n", total);
+ });
+ server.begin();
+}
+
+void loop(){
+ ArduinoOTA.handle();
+ ws.cleanupClients();
+}
diff --git a/lib/libesp32/ESPAsyncWebServer/examples/regex_patterns/.test.build_flags b/lib/libesp32/ESPAsyncWebServer/examples/regex_patterns/.test.build_flags
new file mode 100644
index 000000000..9ea3bb74a
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/examples/regex_patterns/.test.build_flags
@@ -0,0 +1 @@
+-DASYNCWEBSERVER_REGEX=1
diff --git a/lib/libesp32/ESPAsyncWebServer/examples/regex_patterns/regex_patterns.ino b/lib/libesp32/ESPAsyncWebServer/examples/regex_patterns/regex_patterns.ino
new file mode 100644
index 000000000..fb013063e
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/examples/regex_patterns/regex_patterns.ino
@@ -0,0 +1,77 @@
+//
+// A simple server implementation with regex routes:
+// * serve static messages
+// * read GET and POST parameters
+// * handle missing pages / 404s
+//
+
+// Add buildflag ASYNCWEBSERVER_REGEX to enable the regex support
+
+// For platformio: platformio.ini:
+// build_flags =
+// -DASYNCWEBSERVER_REGEX
+
+// For arduino IDE: create/update platform.local.txt
+// Windows: C:\Users\(username)\AppData\Local\Arduino15\packages\espxxxx\hardware\espxxxx\{version}\platform.local.txt
+// Linux: ~/.arduino15/packages/espxxxx/hardware/espxxxx/{version}/platform.local.txt
+//
+// compiler.cpp.extra_flags=-DASYNCWEBSERVER_REGEX=1
+
+#include
+#ifdef ESP32
+#include
+#include
+#elif defined(ESP8266)
+#include
+#include
+#endif
+#include
+
+AsyncWebServer server(80);
+
+const char* ssid = "YOUR_SSID";
+const char* password = "YOUR_PASSWORD";
+
+const char* PARAM_MESSAGE = "message";
+
+void notFound(AsyncWebServerRequest *request) {
+ request->send(404, "text/plain", "Not found");
+}
+
+void setup() {
+
+ Serial.begin(115200);
+ WiFi.mode(WIFI_STA);
+ WiFi.begin(ssid, password);
+ if (WiFi.waitForConnectResult() != WL_CONNECTED) {
+ Serial.printf("WiFi Failed!\n");
+ return;
+ }
+
+ Serial.print("IP Address: ");
+ Serial.println(WiFi.localIP());
+
+ server.on("/", HTTP_GET, [](AsyncWebServerRequest *request){
+ request->send(200, "text/plain", "Hello, world");
+ });
+
+ // Send a GET request to /sensor/
+ server.on("^\\/sensor\\/([0-9]+)$", HTTP_GET, [] (AsyncWebServerRequest *request) {
+ String sensorNumber = request->pathArg(0);
+ request->send(200, "text/plain", "Hello, sensor: " + sensorNumber);
+ });
+
+ // Send a GET request to /sensor//action/
+ server.on("^\\/sensor\\/([0-9]+)\\/action\\/([a-zA-Z0-9]+)$", HTTP_GET, [] (AsyncWebServerRequest *request) {
+ String sensorNumber = request->pathArg(0);
+ String action = request->pathArg(1);
+ request->send(200, "text/plain", "Hello, sensor: " + sensorNumber + ", with action: " + action);
+ });
+
+ server.onNotFound(notFound);
+
+ server.begin();
+}
+
+void loop() {
+}
diff --git a/lib/libesp32/ESPAsyncWebServer/examples/simple_server/simple_server.ino b/lib/libesp32/ESPAsyncWebServer/examples/simple_server/simple_server.ino
new file mode 100644
index 000000000..bdbcf60dc
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/examples/simple_server/simple_server.ino
@@ -0,0 +1,74 @@
+//
+// A simple server implementation showing how to:
+// * serve static messages
+// * read GET and POST parameters
+// * handle missing pages / 404s
+//
+
+#include
+#ifdef ESP32
+#include
+#include
+#elif defined(ESP8266)
+#include
+#include
+#endif
+#include
+
+AsyncWebServer server(80);
+
+const char* ssid = "YOUR_SSID";
+const char* password = "YOUR_PASSWORD";
+
+const char* PARAM_MESSAGE = "message";
+
+void notFound(AsyncWebServerRequest *request) {
+ request->send(404, "text/plain", "Not found");
+}
+
+void setup() {
+
+ Serial.begin(115200);
+ WiFi.mode(WIFI_STA);
+ WiFi.begin(ssid, password);
+ if (WiFi.waitForConnectResult() != WL_CONNECTED) {
+ Serial.printf("WiFi Failed!\n");
+ return;
+ }
+
+ Serial.print("IP Address: ");
+ Serial.println(WiFi.localIP());
+
+ server.on("/", HTTP_GET, [](AsyncWebServerRequest *request){
+ request->send(200, "text/plain", "Hello, world");
+ });
+
+ // Send a GET request to /get?message=
+ server.on("/get", HTTP_GET, [] (AsyncWebServerRequest *request) {
+ String message;
+ if (request->hasParam(PARAM_MESSAGE)) {
+ message = request->getParam(PARAM_MESSAGE)->value();
+ } else {
+ message = "No message sent";
+ }
+ request->send(200, "text/plain", "Hello, GET: " + message);
+ });
+
+ // Send a POST request to /post with a form field message set to
+ server.on("/post", HTTP_POST, [](AsyncWebServerRequest *request){
+ String message;
+ if (request->hasParam(PARAM_MESSAGE, true)) {
+ message = request->getParam(PARAM_MESSAGE, true)->value();
+ } else {
+ message = "No message sent";
+ }
+ request->send(200, "text/plain", "Hello, POST: " + message);
+ });
+
+ server.onNotFound(notFound);
+
+ server.begin();
+}
+
+void loop() {
+}
\ No newline at end of file
diff --git a/lib/libesp32/ESPAsyncWebServer/keywords.txt b/lib/libesp32/ESPAsyncWebServer/keywords.txt
new file mode 100644
index 000000000..c391e6c43
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/keywords.txt
@@ -0,0 +1,3 @@
+JsonArray KEYWORD1
+add KEYWORD2
+createArray KEYWORD3
diff --git a/lib/libesp32/ESPAsyncWebServer/library.json b/lib/libesp32/ESPAsyncWebServer/library.json
new file mode 100644
index 000000000..750ca28d2
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/library.json
@@ -0,0 +1,37 @@
+{
+ "name":"ESP Async WebServer",
+ "description":"Asynchronous HTTP and WebSocket Server Library for ESP8266 and ESP32",
+ "keywords":"http,async,websocket,webserver",
+ "authors":
+ {
+ "name": "Hristo Gochkov",
+ "maintainer": true
+ },
+ "repository":
+ {
+ "type": "git",
+ "url": "https://github.com/me-no-dev/ESPAsyncWebServer.git"
+ },
+ "version": "1.2.3",
+ "license": "LGPL-3.0",
+ "frameworks": "arduino",
+ "platforms": ["espressif8266", "espressif32"],
+ "dependencies": [
+ {
+ "owner": "me-no-dev",
+ "name": "ESPAsyncTCP",
+ "version": "^1.2.2",
+ "platforms": "espressif8266"
+ },
+ {
+ "owner": "me-no-dev",
+ "name": "AsyncTCP",
+ "version": "^1.1.1",
+ "platforms": "espressif32"
+ },
+ {
+ "name": "Hash",
+ "platforms": "espressif8266"
+ }
+ ]
+}
diff --git a/lib/libesp32/ESPAsyncWebServer/library.properties b/lib/libesp32/ESPAsyncWebServer/library.properties
new file mode 100644
index 000000000..401b04173
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/library.properties
@@ -0,0 +1,9 @@
+name=ESP Async WebServer
+version=1.2.3
+author=Me-No-Dev
+maintainer=Me-No-Dev
+sentence=Async Web Server for ESP8266 and ESP31B
+paragraph=Async Web Server for ESP8266 and ESP31B
+category=Other
+url=https://github.com/me-no-dev/ESPAsyncWebServer
+architectures=*
diff --git a/lib/libesp32/ESPAsyncWebServer/src/AsyncEventSource.cpp b/lib/libesp32/ESPAsyncWebServer/src/AsyncEventSource.cpp
new file mode 100644
index 000000000..663177b59
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/src/AsyncEventSource.cpp
@@ -0,0 +1,368 @@
+/*
+ Asynchronous WebServer library for Espressif MCUs
+
+ Copyright (c) 2016 Hristo Gochkov. All rights reserved.
+
+ This library is free software; you can redistribute it and/or
+ modify it under the terms of the GNU Lesser General Public
+ License as published by the Free Software Foundation; either
+ version 2.1 of the License, or (at your option) any later version.
+
+ This library is distributed in the hope that it will be useful,
+ but WITHOUT ANY WARRANTY; without even the implied warranty of
+ MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
+ Lesser General Public License for more details.
+
+ You should have received a copy of the GNU Lesser General Public
+ License along with this library; if not, write to the Free Software
+ Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
+*/
+#include "Arduino.h"
+#include "AsyncEventSource.h"
+
+static String generateEventMessage(const char *message, const char *event, uint32_t id, uint32_t reconnect){
+ String ev = "";
+
+ if(reconnect){
+ ev += "retry: ";
+ ev += String(reconnect);
+ ev += "\r\n";
+ }
+
+ if(id){
+ ev += "id: ";
+ ev += String(id);
+ ev += "\r\n";
+ }
+
+ if(event != NULL){
+ ev += "event: ";
+ ev += String(event);
+ ev += "\r\n";
+ }
+
+ if(message != NULL){
+ size_t messageLen = strlen(message);
+ char * lineStart = (char *)message;
+ char * lineEnd;
+ do {
+ char * nextN = strchr(lineStart, '\n');
+ char * nextR = strchr(lineStart, '\r');
+ if(nextN == NULL && nextR == NULL){
+ size_t llen = ((char *)message + messageLen) - lineStart;
+ char * ldata = (char *)malloc(llen+1);
+ if(ldata != NULL){
+ memcpy(ldata, lineStart, llen);
+ ldata[llen] = 0;
+ ev += "data: ";
+ ev += ldata;
+ ev += "\r\n\r\n";
+ free(ldata);
+ }
+ lineStart = (char *)message + messageLen;
+ } else {
+ char * nextLine = NULL;
+ if(nextN != NULL && nextR != NULL){
+ if(nextR < nextN){
+ lineEnd = nextR;
+ if(nextN == (nextR + 1))
+ nextLine = nextN + 1;
+ else
+ nextLine = nextR + 1;
+ } else {
+ lineEnd = nextN;
+ if(nextR == (nextN + 1))
+ nextLine = nextR + 1;
+ else
+ nextLine = nextN + 1;
+ }
+ } else if(nextN != NULL){
+ lineEnd = nextN;
+ nextLine = nextN + 1;
+ } else {
+ lineEnd = nextR;
+ nextLine = nextR + 1;
+ }
+
+ size_t llen = lineEnd - lineStart;
+ char * ldata = (char *)malloc(llen+1);
+ if(ldata != NULL){
+ memcpy(ldata, lineStart, llen);
+ ldata[llen] = 0;
+ ev += "data: ";
+ ev += ldata;
+ ev += "\r\n";
+ free(ldata);
+ }
+ lineStart = nextLine;
+ if(lineStart == ((char *)message + messageLen))
+ ev += "\r\n";
+ }
+ } while(lineStart < ((char *)message + messageLen));
+ }
+
+ return ev;
+}
+
+// Message
+
+AsyncEventSourceMessage::AsyncEventSourceMessage(const char * data, size_t len)
+: _data(nullptr), _len(len), _sent(0), _acked(0)
+{
+ _data = (uint8_t*)malloc(_len+1);
+ if(_data == nullptr){
+ _len = 0;
+ } else {
+ memcpy(_data, data, len);
+ _data[_len] = 0;
+ }
+}
+
+AsyncEventSourceMessage::~AsyncEventSourceMessage() {
+ if(_data != NULL)
+ free(_data);
+}
+
+size_t AsyncEventSourceMessage::ack(size_t len, uint32_t time) {
+ (void)time;
+ // If the whole message is now acked...
+ if(_acked + len > _len){
+ // Return the number of extra bytes acked (they will be carried on to the next message)
+ const size_t extra = _acked + len - _len;
+ _acked = _len;
+ return extra;
+ }
+ // Return that no extra bytes left.
+ _acked += len;
+ return 0;
+}
+
+size_t AsyncEventSourceMessage::send(AsyncClient *client) {
+ const size_t len = _len - _sent;
+ if(client->space() < len){
+ return 0;
+ }
+ size_t sent = client->add((const char *)_data, len);
+ if(client->canSend())
+ client->send();
+ _sent += sent;
+ return sent;
+}
+
+// Client
+
+AsyncEventSourceClient::AsyncEventSourceClient(AsyncWebServerRequest *request, AsyncEventSource *server)
+: _messageQueue(AsyncLinkedList([](AsyncEventSourceMessage *m){ delete m; }))
+{
+ _client = request->client();
+ _server = server;
+ _lastId = 0;
+ if(request->hasHeader("Last-Event-ID"))
+ _lastId = atoi(request->getHeader("Last-Event-ID")->value().c_str());
+
+ _client->setRxTimeout(0);
+ _client->onError(NULL, NULL);
+ _client->onAck([](void *r, AsyncClient* c, size_t len, uint32_t time){ (void)c; ((AsyncEventSourceClient*)(r))->_onAck(len, time); }, this);
+ _client->onPoll([](void *r, AsyncClient* c){ (void)c; ((AsyncEventSourceClient*)(r))->_onPoll(); }, this);
+ _client->onData(NULL, NULL);
+ _client->onTimeout([this](void *r, AsyncClient* c __attribute__((unused)), uint32_t time){ ((AsyncEventSourceClient*)(r))->_onTimeout(time); }, this);
+ _client->onDisconnect([this](void *r, AsyncClient* c){ ((AsyncEventSourceClient*)(r))->_onDisconnect(); delete c; }, this);
+
+ _server->_addClient(this);
+ delete request;
+}
+
+AsyncEventSourceClient::~AsyncEventSourceClient(){
+ _messageQueue.free();
+ close();
+}
+
+void AsyncEventSourceClient::_queueMessage(AsyncEventSourceMessage *dataMessage){
+ if(dataMessage == NULL)
+ return;
+ if(!connected()){
+ delete dataMessage;
+ return;
+ }
+ if(_messageQueue.length() >= SSE_MAX_QUEUED_MESSAGES){
+ ets_printf("ERROR: Too many messages queued\n");
+ delete dataMessage;
+ } else {
+ _messageQueue.add(dataMessage);
+ }
+ if(_client->canSend())
+ _runQueue();
+}
+
+void AsyncEventSourceClient::_onAck(size_t len, uint32_t time){
+ while(len && !_messageQueue.isEmpty()){
+ len = _messageQueue.front()->ack(len, time);
+ if(_messageQueue.front()->finished())
+ _messageQueue.remove(_messageQueue.front());
+ }
+
+ _runQueue();
+}
+
+void AsyncEventSourceClient::_onPoll(){
+ if(!_messageQueue.isEmpty()){
+ _runQueue();
+ }
+}
+
+
+void AsyncEventSourceClient::_onTimeout(uint32_t time __attribute__((unused))){
+ _client->close(true);
+}
+
+void AsyncEventSourceClient::_onDisconnect(){
+ _client = NULL;
+ _server->_handleDisconnect(this);
+}
+
+void AsyncEventSourceClient::close(){
+ if(_client != NULL)
+ _client->close();
+}
+
+void AsyncEventSourceClient::write(const char * message, size_t len){
+ _queueMessage(new AsyncEventSourceMessage(message, len));
+}
+
+void AsyncEventSourceClient::send(const char *message, const char *event, uint32_t id, uint32_t reconnect){
+ String ev = generateEventMessage(message, event, id, reconnect);
+ _queueMessage(new AsyncEventSourceMessage(ev.c_str(), ev.length()));
+}
+
+void AsyncEventSourceClient::_runQueue(){
+ while(!_messageQueue.isEmpty() && _messageQueue.front()->finished()){
+ _messageQueue.remove(_messageQueue.front());
+ }
+
+ for(auto i = _messageQueue.begin(); i != _messageQueue.end(); ++i)
+ {
+ if(!(*i)->sent())
+ (*i)->send(_client);
+ }
+}
+
+
+// Handler
+
+AsyncEventSource::AsyncEventSource(const String& url)
+ : _url(url)
+ , _clients(AsyncLinkedList([](AsyncEventSourceClient *c){ delete c; }))
+ , _connectcb(NULL)
+{}
+
+AsyncEventSource::~AsyncEventSource(){
+ close();
+}
+
+void AsyncEventSource::onConnect(ArEventHandlerFunction cb){
+ _connectcb = cb;
+}
+
+void AsyncEventSource::_addClient(AsyncEventSourceClient * client){
+ /*char * temp = (char *)malloc(2054);
+ if(temp != NULL){
+ memset(temp+1,' ',2048);
+ temp[0] = ':';
+ temp[2049] = '\r';
+ temp[2050] = '\n';
+ temp[2051] = '\r';
+ temp[2052] = '\n';
+ temp[2053] = 0;
+ client->write((const char *)temp, 2053);
+ free(temp);
+ }*/
+
+ _clients.add(client);
+ if(_connectcb)
+ _connectcb(client);
+}
+
+void AsyncEventSource::_handleDisconnect(AsyncEventSourceClient * client){
+ _clients.remove(client);
+}
+
+void AsyncEventSource::close(){
+ for(const auto &c: _clients){
+ if(c->connected())
+ c->close();
+ }
+}
+
+// pmb fix
+size_t AsyncEventSource::avgPacketsWaiting() const {
+ if(_clients.isEmpty())
+ return 0;
+
+ size_t aql=0;
+ uint32_t nConnectedClients=0;
+
+ for(const auto &c: _clients){
+ if(c->connected()) {
+ aql+=c->packetsWaiting();
+ ++nConnectedClients;
+ }
+ }
+// return aql / nConnectedClients;
+ return ((aql) + (nConnectedClients/2))/(nConnectedClients); // round up
+}
+
+void AsyncEventSource::send(const char *message, const char *event, uint32_t id, uint32_t reconnect){
+
+
+ String ev = generateEventMessage(message, event, id, reconnect);
+ for(const auto &c: _clients){
+ if(c->connected()) {
+ c->write(ev.c_str(), ev.length());
+ }
+ }
+}
+
+size_t AsyncEventSource::count() const {
+ return _clients.count_if([](AsyncEventSourceClient *c){
+ return c->connected();
+ });
+}
+
+bool AsyncEventSource::canHandle(AsyncWebServerRequest *request){
+ if(request->method() != HTTP_GET || !request->url().equals(_url)) {
+ return false;
+ }
+ request->addInterestingHeader("Last-Event-ID");
+ return true;
+}
+
+void AsyncEventSource::handleRequest(AsyncWebServerRequest *request){
+ if((_username != "" && _password != "") && !request->authenticate(_username.c_str(), _password.c_str()))
+ return request->requestAuthentication();
+ request->send(new AsyncEventSourceResponse(this));
+}
+
+// Response
+
+AsyncEventSourceResponse::AsyncEventSourceResponse(AsyncEventSource *server){
+ _server = server;
+ _code = 200;
+ _contentType = "text/event-stream";
+ _sendContentLength = false;
+ addHeader("Cache-Control", "no-cache");
+ addHeader("Connection","keep-alive");
+}
+
+void AsyncEventSourceResponse::_respond(AsyncWebServerRequest *request){
+ String out = _assembleHead(request->version());
+ request->client()->write(out.c_str(), _headLength);
+ _state = RESPONSE_WAIT_ACK;
+}
+
+size_t AsyncEventSourceResponse::_ack(AsyncWebServerRequest *request, size_t len, uint32_t time __attribute__((unused))){
+ if(len){
+ new AsyncEventSourceClient(request, _server);
+ }
+ return 0;
+}
+
diff --git a/lib/libesp32/ESPAsyncWebServer/src/AsyncEventSource.h b/lib/libesp32/ESPAsyncWebServer/src/AsyncEventSource.h
new file mode 100644
index 000000000..6ff43a6e7
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/src/AsyncEventSource.h
@@ -0,0 +1,133 @@
+/*
+ Asynchronous WebServer library for Espressif MCUs
+
+ Copyright (c) 2016 Hristo Gochkov. All rights reserved.
+
+ This library is free software; you can redistribute it and/or
+ modify it under the terms of the GNU Lesser General Public
+ License as published by the Free Software Foundation; either
+ version 2.1 of the License, or (at your option) any later version.
+
+ This library is distributed in the hope that it will be useful,
+ but WITHOUT ANY WARRANTY; without even the implied warranty of
+ MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
+ Lesser General Public License for more details.
+
+ You should have received a copy of the GNU Lesser General Public
+ License along with this library; if not, write to the Free Software
+ Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
+*/
+#ifndef ASYNCEVENTSOURCE_H_
+#define ASYNCEVENTSOURCE_H_
+
+#include
+#ifdef ESP32
+#include
+#define SSE_MAX_QUEUED_MESSAGES 32
+#else
+#include
+#define SSE_MAX_QUEUED_MESSAGES 8
+#endif
+#include
+
+#include "AsyncWebSynchronization.h"
+
+#ifdef ESP8266
+#include
+#ifdef CRYPTO_HASH_h // include Hash.h from espressif framework if the first include was from the crypto library
+#include <../src/Hash.h>
+#endif
+#endif
+
+#ifdef ESP32
+#define DEFAULT_MAX_SSE_CLIENTS 8
+#else
+#define DEFAULT_MAX_SSE_CLIENTS 4
+#endif
+
+class AsyncEventSource;
+class AsyncEventSourceResponse;
+class AsyncEventSourceClient;
+typedef std::function ArEventHandlerFunction;
+
+class AsyncEventSourceMessage {
+ private:
+ uint8_t * _data;
+ size_t _len;
+ size_t _sent;
+ //size_t _ack;
+ size_t _acked;
+ public:
+ AsyncEventSourceMessage(const char * data, size_t len);
+ ~AsyncEventSourceMessage();
+ size_t ack(size_t len, uint32_t time __attribute__((unused)));
+ size_t send(AsyncClient *client);
+ bool finished(){ return _acked == _len; }
+ bool sent() { return _sent == _len; }
+};
+
+class AsyncEventSourceClient {
+ private:
+ AsyncClient *_client;
+ AsyncEventSource *_server;
+ uint32_t _lastId;
+ AsyncLinkedList _messageQueue;
+ void _queueMessage(AsyncEventSourceMessage *dataMessage);
+ void _runQueue();
+
+ public:
+
+ AsyncEventSourceClient(AsyncWebServerRequest *request, AsyncEventSource *server);
+ ~AsyncEventSourceClient();
+
+ AsyncClient* client(){ return _client; }
+ void close();
+ void write(const char * message, size_t len);
+ void send(const char *message, const char *event=NULL, uint32_t id=0, uint32_t reconnect=0);
+ bool connected() const { return (_client != NULL) && _client->connected(); }
+ uint32_t lastId() const { return _lastId; }
+ size_t packetsWaiting() const { return _messageQueue.length(); }
+
+ //system callbacks (do not call)
+ void _onAck(size_t len, uint32_t time);
+ void _onPoll();
+ void _onTimeout(uint32_t time);
+ void _onDisconnect();
+};
+
+class AsyncEventSource: public AsyncWebHandler {
+ private:
+ String _url;
+ AsyncLinkedList _clients;
+ ArEventHandlerFunction _connectcb;
+ public:
+ AsyncEventSource(const String& url);
+ ~AsyncEventSource();
+
+ const char * url() const { return _url.c_str(); }
+ void close();
+ void onConnect(ArEventHandlerFunction cb);
+ void send(const char *message, const char *event=NULL, uint32_t id=0, uint32_t reconnect=0);
+ size_t count() const; //number clinets connected
+ size_t avgPacketsWaiting() const;
+
+ //system callbacks (do not call)
+ void _addClient(AsyncEventSourceClient * client);
+ void _handleDisconnect(AsyncEventSourceClient * client);
+ virtual bool canHandle(AsyncWebServerRequest *request) override final;
+ virtual void handleRequest(AsyncWebServerRequest *request) override final;
+};
+
+class AsyncEventSourceResponse: public AsyncWebServerResponse {
+ private:
+ String _content;
+ AsyncEventSource *_server;
+ public:
+ AsyncEventSourceResponse(AsyncEventSource *server);
+ void _respond(AsyncWebServerRequest *request);
+ size_t _ack(AsyncWebServerRequest *request, size_t len, uint32_t time);
+ bool _sourceValid() const { return true; }
+};
+
+
+#endif /* ASYNCEVENTSOURCE_H_ */
diff --git a/lib/libesp32/ESPAsyncWebServer/src/AsyncJson.h b/lib/libesp32/ESPAsyncWebServer/src/AsyncJson.h
new file mode 100644
index 000000000..2fa6a2d26
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/src/AsyncJson.h
@@ -0,0 +1,254 @@
+// AsyncJson.h
+/*
+ Async Response to use with ArduinoJson and AsyncWebServer
+ Written by Andrew Melvin (SticilFace) with help from me-no-dev and BBlanchon.
+
+ Example of callback in use
+
+ server.on("/json", HTTP_ANY, [](AsyncWebServerRequest * request) {
+
+ AsyncJsonResponse * response = new AsyncJsonResponse();
+ JsonObject& root = response->getRoot();
+ root["key1"] = "key number one";
+ JsonObject& nested = root.createNestedObject("nested");
+ nested["key1"] = "key number one";
+
+ response->setLength();
+ request->send(response);
+ });
+
+ --------------------
+
+ Async Request to use with ArduinoJson and AsyncWebServer
+ Written by Arsène von Wyss (avonwyss)
+
+ Example
+
+ AsyncCallbackJsonWebHandler* handler = new AsyncCallbackJsonWebHandler("/rest/endpoint");
+ handler->onRequest([](AsyncWebServerRequest *request, JsonVariant &json) {
+ JsonObject& jsonObj = json.as();
+ // ...
+ });
+ server.addHandler(handler);
+
+*/
+#ifndef ASYNC_JSON_H_
+#define ASYNC_JSON_H_
+#include
+#include
+#include
+
+#if ARDUINOJSON_VERSION_MAJOR == 5
+ #define ARDUINOJSON_5_COMPATIBILITY
+#else
+ #ifndef DYNAMIC_JSON_DOCUMENT_SIZE
+ #define DYNAMIC_JSON_DOCUMENT_SIZE 1024
+ #endif
+#endif
+
+constexpr const char* JSON_MIMETYPE = "application/json";
+
+/*
+ * Json Response
+ * */
+
+class ChunkPrint : public Print {
+ private:
+ uint8_t* _destination;
+ size_t _to_skip;
+ size_t _to_write;
+ size_t _pos;
+ public:
+ ChunkPrint(uint8_t* destination, size_t from, size_t len)
+ : _destination(destination), _to_skip(from), _to_write(len), _pos{0} {}
+ virtual ~ChunkPrint(){}
+ size_t write(uint8_t c){
+ if (_to_skip > 0) {
+ _to_skip--;
+ return 1;
+ } else if (_to_write > 0) {
+ _to_write--;
+ _destination[_pos++] = c;
+ return 1;
+ }
+ return 0;
+ }
+ size_t write(const uint8_t *buffer, size_t size)
+ {
+ return this->Print::write(buffer, size);
+ }
+};
+
+class AsyncJsonResponse: public AsyncAbstractResponse {
+ protected:
+
+#ifdef ARDUINOJSON_5_COMPATIBILITY
+ DynamicJsonBuffer _jsonBuffer;
+#else
+ DynamicJsonDocument _jsonBuffer;
+#endif
+
+ JsonVariant _root;
+ bool _isValid;
+
+ public:
+
+#ifdef ARDUINOJSON_5_COMPATIBILITY
+ AsyncJsonResponse(bool isArray=false): _isValid{false} {
+ _code = 200;
+ _contentType = JSON_MIMETYPE;
+ if(isArray)
+ _root = _jsonBuffer.createArray();
+ else
+ _root = _jsonBuffer.createObject();
+ }
+#else
+ AsyncJsonResponse(bool isArray=false, size_t maxJsonBufferSize = DYNAMIC_JSON_DOCUMENT_SIZE) : _jsonBuffer(maxJsonBufferSize), _isValid{false} {
+ _code = 200;
+ _contentType = JSON_MIMETYPE;
+ if(isArray)
+ _root = _jsonBuffer.createNestedArray();
+ else
+ _root = _jsonBuffer.createNestedObject();
+ }
+#endif
+
+ ~AsyncJsonResponse() {}
+ JsonVariant & getRoot() { return _root; }
+ bool _sourceValid() const { return _isValid; }
+ size_t setLength() {
+
+#ifdef ARDUINOJSON_5_COMPATIBILITY
+ _contentLength = _root.measureLength();
+#else
+ _contentLength = measureJson(_root);
+#endif
+
+ if (_contentLength) { _isValid = true; }
+ return _contentLength;
+ }
+
+ size_t getSize() { return _jsonBuffer.size(); }
+
+ size_t _fillBuffer(uint8_t *data, size_t len){
+ ChunkPrint dest(data, _sentLength, len);
+
+#ifdef ARDUINOJSON_5_COMPATIBILITY
+ _root.printTo( dest ) ;
+#else
+ serializeJson(_root, dest);
+#endif
+ return len;
+ }
+};
+
+class PrettyAsyncJsonResponse: public AsyncJsonResponse {
+public:
+#ifdef ARDUINOJSON_5_COMPATIBILITY
+ PrettyAsyncJsonResponse (bool isArray=false) : AsyncJsonResponse{isArray} {}
+#else
+ PrettyAsyncJsonResponse (bool isArray=false, size_t maxJsonBufferSize = DYNAMIC_JSON_DOCUMENT_SIZE) : AsyncJsonResponse{isArray, maxJsonBufferSize} {}
+#endif
+ size_t setLength () {
+#ifdef ARDUINOJSON_5_COMPATIBILITY
+ _contentLength = _root.measurePrettyLength ();
+#else
+ _contentLength = measureJsonPretty(_root);
+#endif
+ if (_contentLength) {_isValid = true;}
+ return _contentLength;
+ }
+ size_t _fillBuffer (uint8_t *data, size_t len) {
+ ChunkPrint dest (data, _sentLength, len);
+#ifdef ARDUINOJSON_5_COMPATIBILITY
+ _root.prettyPrintTo (dest);
+#else
+ serializeJsonPretty(_root, dest);
+#endif
+ return len;
+ }
+};
+
+typedef std::function ArJsonRequestHandlerFunction;
+
+class AsyncCallbackJsonWebHandler: public AsyncWebHandler {
+private:
+protected:
+ const String _uri;
+ WebRequestMethodComposite _method;
+ ArJsonRequestHandlerFunction _onRequest;
+ size_t _contentLength;
+#ifndef ARDUINOJSON_5_COMPATIBILITY
+ const size_t maxJsonBufferSize;
+#endif
+ size_t _maxContentLength;
+public:
+#ifdef ARDUINOJSON_5_COMPATIBILITY
+ AsyncCallbackJsonWebHandler(const String& uri, ArJsonRequestHandlerFunction onRequest)
+ : _uri(uri), _method(HTTP_POST|HTTP_PUT|HTTP_PATCH), _onRequest(onRequest), _maxContentLength(16384) {}
+#else
+ AsyncCallbackJsonWebHandler(const String& uri, ArJsonRequestHandlerFunction onRequest, size_t maxJsonBufferSize=DYNAMIC_JSON_DOCUMENT_SIZE)
+ : _uri(uri), _method(HTTP_POST|HTTP_PUT|HTTP_PATCH), _onRequest(onRequest), maxJsonBufferSize(maxJsonBufferSize), _maxContentLength(16384) {}
+#endif
+
+ void setMethod(WebRequestMethodComposite method){ _method = method; }
+ void setMaxContentLength(int maxContentLength){ _maxContentLength = maxContentLength; }
+ void onRequest(ArJsonRequestHandlerFunction fn){ _onRequest = fn; }
+
+ virtual bool canHandle(AsyncWebServerRequest *request) override final{
+ if(!_onRequest)
+ return false;
+
+ if(!(_method & request->method()))
+ return false;
+
+ if(_uri.length() && (_uri != request->url() && !request->url().startsWith(_uri+"/")))
+ return false;
+
+ if ( !request->contentType().equalsIgnoreCase(JSON_MIMETYPE) )
+ return false;
+
+ request->addInterestingHeader("ANY");
+ return true;
+ }
+
+ virtual void handleRequest(AsyncWebServerRequest *request) override final {
+ if(_onRequest) {
+ if (request->_tempObject != NULL) {
+
+#ifdef ARDUINOJSON_5_COMPATIBILITY
+ DynamicJsonBuffer jsonBuffer;
+ JsonVariant json = jsonBuffer.parse((uint8_t*)(request->_tempObject));
+ if (json.success()) {
+#else
+ DynamicJsonDocument jsonBuffer(this->maxJsonBufferSize);
+ DeserializationError error = deserializeJson(jsonBuffer, (uint8_t*)(request->_tempObject));
+ if(!error) {
+ JsonVariant json = jsonBuffer.as();
+#endif
+
+ _onRequest(request, json);
+ return;
+ }
+ }
+ request->send(_contentLength > _maxContentLength ? 413 : 400);
+ } else {
+ request->send(500);
+ }
+ }
+ virtual void handleUpload(AsyncWebServerRequest *request, const String& filename, size_t index, uint8_t *data, size_t len, bool final) override final {
+ }
+ virtual void handleBody(AsyncWebServerRequest *request, uint8_t *data, size_t len, size_t index, size_t total) override final {
+ if (_onRequest) {
+ _contentLength = total;
+ if (total > 0 && request->_tempObject == NULL && total < _maxContentLength) {
+ request->_tempObject = malloc(total);
+ }
+ if (request->_tempObject != NULL) {
+ memcpy((uint8_t*)(request->_tempObject) + index, data, len);
+ }
+ }
+ }
+ virtual bool isRequestHandlerTrivial() override final {return _onRequest ? false : true;}
+};
+#endif
diff --git a/lib/libesp32/ESPAsyncWebServer/src/AsyncWebSocket.cpp b/lib/libesp32/ESPAsyncWebServer/src/AsyncWebSocket.cpp
new file mode 100644
index 000000000..df0d668a9
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/src/AsyncWebSocket.cpp
@@ -0,0 +1,1294 @@
+/*
+ Asynchronous WebServer library for Espressif MCUs
+
+ Copyright (c) 2016 Hristo Gochkov. All rights reserved.
+ This file is part of the esp8266 core for Arduino environment.
+
+ This library is free software; you can redistribute it and/or
+ modify it under the terms of the GNU Lesser General Public
+ License as published by the Free Software Foundation; either
+ version 2.1 of the License, or (at your option) any later version.
+
+ This library is distributed in the hope that it will be useful,
+ but WITHOUT ANY WARRANTY; without even the implied warranty of
+ MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
+ Lesser General Public License for more details.
+
+ You should have received a copy of the GNU Lesser General Public
+ License along with this library; if not, write to the Free Software
+ Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
+*/
+#include "Arduino.h"
+#include "AsyncWebSocket.h"
+
+#include
+
+#ifndef ESP8266
+#include "mbedtls/sha1.h"
+#else
+#include
+#endif
+
+#define MAX_PRINTF_LEN 64
+
+size_t webSocketSendFrameWindow(AsyncClient *client){
+ if(!client->canSend())
+ return 0;
+ size_t space = client->space();
+ if(space < 9)
+ return 0;
+ return space - 8;
+}
+
+size_t webSocketSendFrame(AsyncClient *client, bool final, uint8_t opcode, bool mask, uint8_t *data, size_t len){
+ if(!client->canSend())
+ return 0;
+ size_t space = client->space();
+ if(space < 2)
+ return 0;
+ uint8_t mbuf[4] = {0,0,0,0};
+ uint8_t headLen = 2;
+ if(len && mask){
+ headLen += 4;
+ mbuf[0] = rand() % 0xFF;
+ mbuf[1] = rand() % 0xFF;
+ mbuf[2] = rand() % 0xFF;
+ mbuf[3] = rand() % 0xFF;
+ }
+ if(len > 125)
+ headLen += 2;
+ if(space < headLen)
+ return 0;
+ space -= headLen;
+
+ if(len > space) len = space;
+
+ uint8_t *buf = (uint8_t*)malloc(headLen);
+ if(buf == NULL){
+ //os_printf("could not malloc %u bytes for frame header\n", headLen);
+ return 0;
+ }
+
+ buf[0] = opcode & 0x0F;
+ if(final)
+ buf[0] |= 0x80;
+ if(len < 126)
+ buf[1] = len & 0x7F;
+ else {
+ buf[1] = 126;
+ buf[2] = (uint8_t)((len >> 8) & 0xFF);
+ buf[3] = (uint8_t)(len & 0xFF);
+ }
+ if(len && mask){
+ buf[1] |= 0x80;
+ memcpy(buf + (headLen - 4), mbuf, 4);
+ }
+ if(client->add((const char *)buf, headLen) != headLen){
+ //os_printf("error adding %lu header bytes\n", headLen);
+ free(buf);
+ return 0;
+ }
+ free(buf);
+
+ if(len){
+ if(len && mask){
+ size_t i;
+ for(i=0;iadd((const char *)data, len) != len){
+ //os_printf("error adding %lu data bytes\n", len);
+ return 0;
+ }
+ }
+ if(!client->send()){
+ //os_printf("error sending frame: %lu\n", headLen+len);
+ return 0;
+ }
+ return len;
+}
+
+
+/*
+ * AsyncWebSocketMessageBuffer
+ */
+
+
+
+AsyncWebSocketMessageBuffer::AsyncWebSocketMessageBuffer()
+ :_data(nullptr)
+ ,_len(0)
+ ,_lock(false)
+ ,_count(0)
+{
+
+}
+
+AsyncWebSocketMessageBuffer::AsyncWebSocketMessageBuffer(uint8_t * data, size_t size)
+ :_data(nullptr)
+ ,_len(size)
+ ,_lock(false)
+ ,_count(0)
+{
+
+ if (!data) {
+ return;
+ }
+
+ _data = new uint8_t[_len + 1];
+
+ if (_data) {
+ memcpy(_data, data, _len);
+ _data[_len] = 0;
+ }
+}
+
+
+AsyncWebSocketMessageBuffer::AsyncWebSocketMessageBuffer(size_t size)
+ :_data(nullptr)
+ ,_len(size)
+ ,_lock(false)
+ ,_count(0)
+{
+ _data = new uint8_t[_len + 1];
+
+ if (_data) {
+ _data[_len] = 0;
+ }
+
+}
+
+AsyncWebSocketMessageBuffer::AsyncWebSocketMessageBuffer(const AsyncWebSocketMessageBuffer & copy)
+ :_data(nullptr)
+ ,_len(0)
+ ,_lock(false)
+ ,_count(0)
+{
+ _len = copy._len;
+ _lock = copy._lock;
+ _count = 0;
+
+ if (_len) {
+ _data = new uint8_t[_len + 1];
+ _data[_len] = 0;
+ }
+
+ if (_data) {
+ memcpy(_data, copy._data, _len);
+ _data[_len] = 0;
+ }
+
+}
+
+AsyncWebSocketMessageBuffer::AsyncWebSocketMessageBuffer(AsyncWebSocketMessageBuffer && copy)
+ :_data(nullptr)
+ ,_len(0)
+ ,_lock(false)
+ ,_count(0)
+{
+ _len = copy._len;
+ _lock = copy._lock;
+ _count = 0;
+
+ if (copy._data) {
+ _data = copy._data;
+ copy._data = nullptr;
+ }
+
+}
+
+AsyncWebSocketMessageBuffer::~AsyncWebSocketMessageBuffer()
+{
+ if (_data) {
+ delete[] _data;
+ }
+}
+
+bool AsyncWebSocketMessageBuffer::reserve(size_t size)
+{
+ _len = size;
+
+ if (_data) {
+ delete[] _data;
+ _data = nullptr;
+ }
+
+ _data = new uint8_t[_len + 1];
+
+ if (_data) {
+ _data[_len] = 0;
+ return true;
+ } else {
+ return false;
+ }
+
+}
+
+
+
+/*
+ * Control Frame
+ */
+
+class AsyncWebSocketControl {
+ private:
+ uint8_t _opcode;
+ uint8_t *_data;
+ size_t _len;
+ bool _mask;
+ bool _finished;
+ public:
+ AsyncWebSocketControl(uint8_t opcode, uint8_t *data=NULL, size_t len=0, bool mask=false)
+ :_opcode(opcode)
+ ,_len(len)
+ ,_mask(len && mask)
+ ,_finished(false)
+ {
+ if(data == NULL)
+ _len = 0;
+ if(_len){
+ if(_len > 125)
+ _len = 125;
+ _data = (uint8_t*)malloc(_len);
+ if(_data == NULL)
+ _len = 0;
+ else memcpy(_data, data, len);
+ } else _data = NULL;
+ }
+ virtual ~AsyncWebSocketControl(){
+ if(_data != NULL)
+ free(_data);
+ }
+ virtual bool finished() const { return _finished; }
+ uint8_t opcode(){ return _opcode; }
+ uint8_t len(){ return _len + 2; }
+ size_t send(AsyncClient *client){
+ _finished = true;
+ return webSocketSendFrame(client, true, _opcode & 0x0F, _mask, _data, _len);
+ }
+};
+
+/*
+ * Basic Buffered Message
+ */
+
+
+AsyncWebSocketBasicMessage::AsyncWebSocketBasicMessage(const char * data, size_t len, uint8_t opcode, bool mask)
+ :_len(len)
+ ,_sent(0)
+ ,_ack(0)
+ ,_acked(0)
+{
+ _opcode = opcode & 0x07;
+ _mask = mask;
+ _data = (uint8_t*)malloc(_len+1);
+ if(_data == NULL){
+ _len = 0;
+ _status = WS_MSG_ERROR;
+ } else {
+ _status = WS_MSG_SENDING;
+ memcpy(_data, data, _len);
+ _data[_len] = 0;
+ }
+}
+AsyncWebSocketBasicMessage::AsyncWebSocketBasicMessage(uint8_t opcode, bool mask)
+ :_len(0)
+ ,_sent(0)
+ ,_ack(0)
+ ,_acked(0)
+ ,_data(NULL)
+{
+ _opcode = opcode & 0x07;
+ _mask = mask;
+
+}
+
+
+AsyncWebSocketBasicMessage::~AsyncWebSocketBasicMessage() {
+ if(_data != NULL)
+ free(_data);
+}
+
+ void AsyncWebSocketBasicMessage::ack(size_t len, uint32_t time) {
+ (void)time;
+ _acked += len;
+ if(_sent == _len && _acked == _ack){
+ _status = WS_MSG_SENT;
+ }
+}
+ size_t AsyncWebSocketBasicMessage::send(AsyncClient *client) {
+ if(_status != WS_MSG_SENDING)
+ return 0;
+ if(_acked < _ack){
+ return 0;
+ }
+ if(_sent == _len){
+ if(_acked == _ack)
+ _status = WS_MSG_SENT;
+ return 0;
+ }
+ if(_sent > _len){
+ _status = WS_MSG_ERROR;
+ return 0;
+ }
+
+ size_t toSend = _len - _sent;
+ size_t window = webSocketSendFrameWindow(client);
+
+ if(window < toSend) {
+ toSend = window;
+ }
+
+ _sent += toSend;
+ _ack += toSend + ((toSend < 126)?2:4) + (_mask * 4);
+
+ bool final = (_sent == _len);
+ uint8_t* dPtr = (uint8_t*)(_data + (_sent - toSend));
+ uint8_t opCode = (toSend && _sent == toSend)?_opcode:(uint8_t)WS_CONTINUATION;
+
+ size_t sent = webSocketSendFrame(client, final, opCode, _mask, dPtr, toSend);
+ _status = WS_MSG_SENDING;
+ if(toSend && sent != toSend){
+ _sent -= (toSend - sent);
+ _ack -= (toSend - sent);
+ }
+ return sent;
+}
+
+// bool AsyncWebSocketBasicMessage::reserve(size_t size) {
+// if (size) {
+// _data = (uint8_t*)malloc(size +1);
+// if (_data) {
+// memset(_data, 0, size);
+// _len = size;
+// _status = WS_MSG_SENDING;
+// return true;
+// }
+// }
+// return false;
+// }
+
+
+/*
+ * AsyncWebSocketMultiMessage Message
+ */
+
+
+AsyncWebSocketMultiMessage::AsyncWebSocketMultiMessage(AsyncWebSocketMessageBuffer * buffer, uint8_t opcode, bool mask)
+ :_len(0)
+ ,_sent(0)
+ ,_ack(0)
+ ,_acked(0)
+ ,_WSbuffer(nullptr)
+{
+
+ _opcode = opcode & 0x07;
+ _mask = mask;
+
+ if (buffer) {
+ _WSbuffer = buffer;
+ (*_WSbuffer)++;
+ _data = buffer->get();
+ _len = buffer->length();
+ _status = WS_MSG_SENDING;
+ //ets_printf("M: %u\n", _len);
+ } else {
+ _status = WS_MSG_ERROR;
+ }
+
+}
+
+
+AsyncWebSocketMultiMessage::~AsyncWebSocketMultiMessage() {
+ if (_WSbuffer) {
+ (*_WSbuffer)--; // decreases the counter.
+ }
+}
+
+ void AsyncWebSocketMultiMessage::ack(size_t len, uint32_t time) {
+ (void)time;
+ _acked += len;
+ if(_sent >= _len && _acked >= _ack){
+ _status = WS_MSG_SENT;
+ }
+ //ets_printf("A: %u\n", len);
+}
+ size_t AsyncWebSocketMultiMessage::send(AsyncClient *client) {
+ if(_status != WS_MSG_SENDING)
+ return 0;
+ if(_acked < _ack){
+ return 0;
+ }
+ if(_sent == _len){
+ _status = WS_MSG_SENT;
+ return 0;
+ }
+ if(_sent > _len){
+ _status = WS_MSG_ERROR;
+ //ets_printf("E: %u > %u\n", _sent, _len);
+ return 0;
+ }
+
+ size_t toSend = _len - _sent;
+ size_t window = webSocketSendFrameWindow(client);
+
+ if(window < toSend) {
+ toSend = window;
+ }
+
+ _sent += toSend;
+ _ack += toSend + ((toSend < 126)?2:4) + (_mask * 4);
+
+ //ets_printf("W: %u %u\n", _sent - toSend, toSend);
+
+ bool final = (_sent == _len);
+ uint8_t* dPtr = (uint8_t*)(_data + (_sent - toSend));
+ uint8_t opCode = (toSend && _sent == toSend)?_opcode:(uint8_t)WS_CONTINUATION;
+
+ size_t sent = webSocketSendFrame(client, final, opCode, _mask, dPtr, toSend);
+ _status = WS_MSG_SENDING;
+ if(toSend && sent != toSend){
+ //ets_printf("E: %u != %u\n", toSend, sent);
+ _sent -= (toSend - sent);
+ _ack -= (toSend - sent);
+ }
+ //ets_printf("S: %u %u\n", _sent, sent);
+ return sent;
+}
+
+
+/*
+ * Async WebSocket Client
+ */
+ const char * AWSC_PING_PAYLOAD = "ESPAsyncWebServer-PING";
+ const size_t AWSC_PING_PAYLOAD_LEN = 22;
+
+AsyncWebSocketClient::AsyncWebSocketClient(AsyncWebServerRequest *request, AsyncWebSocket *server)
+ : _controlQueue(AsyncLinkedList([](AsyncWebSocketControl *c){ delete c; }))
+ , _messageQueue(AsyncLinkedList([](AsyncWebSocketMessage *m){ delete m; }))
+ , _tempObject(NULL)
+{
+ _client = request->client();
+ _server = server;
+ _clientId = _server->_getNextId();
+ _status = WS_CONNECTED;
+ _pstate = 0;
+ _lastMessageTime = millis();
+ _keepAlivePeriod = 0;
+ _client->setRxTimeout(0);
+ _client->onError([](void *r, AsyncClient* c, int8_t error){ (void)c; ((AsyncWebSocketClient*)(r))->_onError(error); }, this);
+ _client->onAck([](void *r, AsyncClient* c, size_t len, uint32_t time){ (void)c; ((AsyncWebSocketClient*)(r))->_onAck(len, time); }, this);
+ _client->onDisconnect([](void *r, AsyncClient* c){ ((AsyncWebSocketClient*)(r))->_onDisconnect(); delete c; }, this);
+ _client->onTimeout([](void *r, AsyncClient* c, uint32_t time){ (void)c; ((AsyncWebSocketClient*)(r))->_onTimeout(time); }, this);
+ _client->onData([](void *r, AsyncClient* c, void *buf, size_t len){ (void)c; ((AsyncWebSocketClient*)(r))->_onData(buf, len); }, this);
+ _client->onPoll([](void *r, AsyncClient* c){ (void)c; ((AsyncWebSocketClient*)(r))->_onPoll(); }, this);
+ _server->_addClient(this);
+ _server->_handleEvent(this, WS_EVT_CONNECT, request, NULL, 0);
+ delete request;
+}
+
+AsyncWebSocketClient::~AsyncWebSocketClient(){
+ _messageQueue.free();
+ _controlQueue.free();
+ _server->_handleEvent(this, WS_EVT_DISCONNECT, NULL, NULL, 0);
+}
+
+void AsyncWebSocketClient::_onAck(size_t len, uint32_t time){
+ _lastMessageTime = millis();
+ if(!_controlQueue.isEmpty()){
+ auto head = _controlQueue.front();
+ if(head->finished()){
+ len -= head->len();
+ if(_status == WS_DISCONNECTING && head->opcode() == WS_DISCONNECT){
+ _controlQueue.remove(head);
+ _status = WS_DISCONNECTED;
+ _client->close(true);
+ return;
+ }
+ _controlQueue.remove(head);
+ }
+ }
+ if(len && !_messageQueue.isEmpty()){
+ _messageQueue.front()->ack(len, time);
+ }
+ _server->_cleanBuffers();
+ _runQueue();
+}
+
+void AsyncWebSocketClient::_onPoll(){
+ if(_client->canSend() && (!_controlQueue.isEmpty() || !_messageQueue.isEmpty())){
+ _runQueue();
+ } else if(_keepAlivePeriod > 0 && _controlQueue.isEmpty() && _messageQueue.isEmpty() && (millis() - _lastMessageTime) >= _keepAlivePeriod){
+ ping((uint8_t *)AWSC_PING_PAYLOAD, AWSC_PING_PAYLOAD_LEN);
+ }
+}
+
+void AsyncWebSocketClient::_runQueue(){
+ while(!_messageQueue.isEmpty() && _messageQueue.front()->finished()){
+ _messageQueue.remove(_messageQueue.front());
+ }
+
+ if(!_controlQueue.isEmpty() && (_messageQueue.isEmpty() || _messageQueue.front()->betweenFrames()) && webSocketSendFrameWindow(_client) > (size_t)(_controlQueue.front()->len() - 1)){
+ _controlQueue.front()->send(_client);
+ } else if(!_messageQueue.isEmpty() && _messageQueue.front()->betweenFrames() && webSocketSendFrameWindow(_client)){
+ _messageQueue.front()->send(_client);
+ }
+}
+
+bool AsyncWebSocketClient::queueIsFull(){
+ if((_messageQueue.length() >= WS_MAX_QUEUED_MESSAGES) || (_status != WS_CONNECTED) ) return true;
+ return false;
+}
+
+void AsyncWebSocketClient::_queueMessage(AsyncWebSocketMessage *dataMessage){
+ if(dataMessage == NULL)
+ return;
+ if(_status != WS_CONNECTED){
+ delete dataMessage;
+ return;
+ }
+ if(_messageQueue.length() >= WS_MAX_QUEUED_MESSAGES){
+ ets_printf("ERROR: Too many messages queued\n");
+ delete dataMessage;
+ } else {
+ _messageQueue.add(dataMessage);
+ }
+ if(_client->canSend())
+ _runQueue();
+}
+
+void AsyncWebSocketClient::_queueControl(AsyncWebSocketControl *controlMessage){
+ if(controlMessage == NULL)
+ return;
+ _controlQueue.add(controlMessage);
+ if(_client->canSend())
+ _runQueue();
+}
+
+void AsyncWebSocketClient::close(uint16_t code, const char * message){
+ if(_status != WS_CONNECTED)
+ return;
+ if(code){
+ uint8_t packetLen = 2;
+ if(message != NULL){
+ size_t mlen = strlen(message);
+ if(mlen > 123) mlen = 123;
+ packetLen += mlen;
+ }
+ char * buf = (char*)malloc(packetLen);
+ if(buf != NULL){
+ buf[0] = (uint8_t)(code >> 8);
+ buf[1] = (uint8_t)(code & 0xFF);
+ if(message != NULL){
+ memcpy(buf+2, message, packetLen -2);
+ }
+ _queueControl(new AsyncWebSocketControl(WS_DISCONNECT,(uint8_t*)buf,packetLen));
+ free(buf);
+ return;
+ }
+ }
+ _queueControl(new AsyncWebSocketControl(WS_DISCONNECT));
+}
+
+void AsyncWebSocketClient::ping(uint8_t *data, size_t len){
+ if(_status == WS_CONNECTED)
+ _queueControl(new AsyncWebSocketControl(WS_PING, data, len));
+}
+
+void AsyncWebSocketClient::_onError(int8_t){}
+
+void AsyncWebSocketClient::_onTimeout(uint32_t time){
+ (void)time;
+ _client->close(true);
+}
+
+void AsyncWebSocketClient::_onDisconnect(){
+ _client = NULL;
+ _server->_handleDisconnect(this);
+}
+
+void AsyncWebSocketClient::_onData(void *pbuf, size_t plen){
+ _lastMessageTime = millis();
+ uint8_t *data = (uint8_t*)pbuf;
+ while(plen > 0){
+ if(!_pstate){
+ const uint8_t *fdata = data;
+ _pinfo.index = 0;
+ _pinfo.final = (fdata[0] & 0x80) != 0;
+ _pinfo.opcode = fdata[0] & 0x0F;
+ _pinfo.masked = (fdata[1] & 0x80) != 0;
+ _pinfo.len = fdata[1] & 0x7F;
+ data += 2;
+ plen -= 2;
+ if(_pinfo.len == 126){
+ _pinfo.len = fdata[3] | (uint16_t)(fdata[2]) << 8;
+ data += 2;
+ plen -= 2;
+ } else if(_pinfo.len == 127){
+ _pinfo.len = fdata[9] | (uint16_t)(fdata[8]) << 8 | (uint32_t)(fdata[7]) << 16 | (uint32_t)(fdata[6]) << 24 | (uint64_t)(fdata[5]) << 32 | (uint64_t)(fdata[4]) << 40 | (uint64_t)(fdata[3]) << 48 | (uint64_t)(fdata[2]) << 56;
+ data += 8;
+ plen -= 8;
+ }
+
+ if(_pinfo.masked){
+ memcpy(_pinfo.mask, data, 4);
+ data += 4;
+ plen -= 4;
+ }
+ }
+
+ const size_t datalen = std::min((size_t)(_pinfo.len - _pinfo.index), plen);
+ const auto datalast = data[datalen];
+
+ if(_pinfo.masked){
+ for(size_t i=0;i_handleEvent(this, WS_EVT_DATA, (void *)&_pinfo, (uint8_t*)data, datalen);
+
+ _pinfo.index += datalen;
+ } else if((datalen + _pinfo.index) == _pinfo.len){
+ _pstate = 0;
+ if(_pinfo.opcode == WS_DISCONNECT){
+ if(datalen){
+ uint16_t reasonCode = (uint16_t)(data[0] << 8) + data[1];
+ char * reasonString = (char*)(data+2);
+ if(reasonCode > 1001){
+ _server->_handleEvent(this, WS_EVT_ERROR, (void *)&reasonCode, (uint8_t*)reasonString, strlen(reasonString));
+ }
+ }
+ if(_status == WS_DISCONNECTING){
+ _status = WS_DISCONNECTED;
+ _client->close(true);
+ } else {
+ _status = WS_DISCONNECTING;
+ _client->ackLater();
+ _queueControl(new AsyncWebSocketControl(WS_DISCONNECT, data, datalen));
+ }
+ } else if(_pinfo.opcode == WS_PING){
+ _queueControl(new AsyncWebSocketControl(WS_PONG, data, datalen));
+ } else if(_pinfo.opcode == WS_PONG){
+ if(datalen != AWSC_PING_PAYLOAD_LEN || memcmp(AWSC_PING_PAYLOAD, data, AWSC_PING_PAYLOAD_LEN) != 0)
+ _server->_handleEvent(this, WS_EVT_PONG, NULL, data, datalen);
+ } else if(_pinfo.opcode < 8){//continuation or text/binary frame
+ _server->_handleEvent(this, WS_EVT_DATA, (void *)&_pinfo, data, datalen);
+ }
+ } else {
+ //os_printf("frame error: len: %u, index: %llu, total: %llu\n", datalen, _pinfo.index, _pinfo.len);
+ //what should we do?
+ break;
+ }
+
+ // restore byte as _handleEvent may have added a null terminator i.e., data[len] = 0;
+ if (datalen > 0)
+ data[datalen] = datalast;
+
+ data += datalen;
+ plen -= datalen;
+ }
+}
+
+size_t AsyncWebSocketClient::printf(const char *format, ...) {
+ va_list arg;
+ va_start(arg, format);
+ char* temp = new char[MAX_PRINTF_LEN];
+ if(!temp){
+ va_end(arg);
+ return 0;
+ }
+ char* buffer = temp;
+ size_t len = vsnprintf(temp, MAX_PRINTF_LEN, format, arg);
+ va_end(arg);
+
+ if (len > (MAX_PRINTF_LEN - 1)) {
+ buffer = new char[len + 1];
+ if (!buffer) {
+ delete[] temp;
+ return 0;
+ }
+ va_start(arg, format);
+ vsnprintf(buffer, len + 1, format, arg);
+ va_end(arg);
+ }
+ text(buffer, len);
+ if (buffer != temp) {
+ delete[] buffer;
+ }
+ delete[] temp;
+ return len;
+}
+
+#ifndef ESP32
+size_t AsyncWebSocketClient::printf_P(PGM_P formatP, ...) {
+ va_list arg;
+ va_start(arg, formatP);
+ char* temp = new char[MAX_PRINTF_LEN];
+ if(!temp){
+ va_end(arg);
+ return 0;
+ }
+ char* buffer = temp;
+ size_t len = vsnprintf_P(temp, MAX_PRINTF_LEN, formatP, arg);
+ va_end(arg);
+
+ if (len > (MAX_PRINTF_LEN - 1)) {
+ buffer = new char[len + 1];
+ if (!buffer) {
+ delete[] temp;
+ return 0;
+ }
+ va_start(arg, formatP);
+ vsnprintf_P(buffer, len + 1, formatP, arg);
+ va_end(arg);
+ }
+ text(buffer, len);
+ if (buffer != temp) {
+ delete[] buffer;
+ }
+ delete[] temp;
+ return len;
+}
+#endif
+
+void AsyncWebSocketClient::text(const char * message, size_t len){
+ _queueMessage(new AsyncWebSocketBasicMessage(message, len));
+}
+void AsyncWebSocketClient::text(const char * message){
+ text(message, strlen(message));
+}
+void AsyncWebSocketClient::text(uint8_t * message, size_t len){
+ text((const char *)message, len);
+}
+void AsyncWebSocketClient::text(char * message){
+ text(message, strlen(message));
+}
+void AsyncWebSocketClient::text(const String &message){
+ text(message.c_str(), message.length());
+}
+void AsyncWebSocketClient::text(const __FlashStringHelper *data){
+ PGM_P p = reinterpret_cast(data);
+ size_t n = 0;
+ while (1) {
+ if (pgm_read_byte(p+n) == 0) break;
+ n += 1;
+ }
+ char * message = (char*) malloc(n+1);
+ if(message){
+ for(size_t b=0; b(data);
+ char * message = (char*) malloc(len);
+ if(message){
+ for(size_t b=0; bremoteIP();
+}
+
+uint16_t AsyncWebSocketClient::remotePort() {
+ if(!_client) {
+ return 0;
+ }
+ return _client->remotePort();
+}
+
+
+
+/*
+ * Async Web Socket - Each separate socket location
+ */
+
+AsyncWebSocket::AsyncWebSocket(const String& url)
+ :_url(url)
+ ,_clients(AsyncLinkedList([](AsyncWebSocketClient *c){ delete c; }))
+ ,_cNextId(1)
+ ,_enabled(true)
+ ,_buffers(AsyncLinkedList([](AsyncWebSocketMessageBuffer *b){ delete b; }))
+{
+ _eventHandler = NULL;
+}
+
+AsyncWebSocket::~AsyncWebSocket(){}
+
+void AsyncWebSocket::_handleEvent(AsyncWebSocketClient * client, AwsEventType type, void * arg, uint8_t *data, size_t len){
+ if(_eventHandler != NULL){
+ _eventHandler(this, client, type, arg, data, len);
+ }
+}
+
+void AsyncWebSocket::_addClient(AsyncWebSocketClient * client){
+ _clients.add(client);
+}
+
+void AsyncWebSocket::_handleDisconnect(AsyncWebSocketClient * client){
+
+ _clients.remove_first([=](AsyncWebSocketClient * c){
+ return c->id() == client->id();
+ });
+}
+
+bool AsyncWebSocket::availableForWriteAll(){
+ for(const auto& c: _clients){
+ if(c->queueIsFull()) return false;
+ }
+ return true;
+}
+
+bool AsyncWebSocket::availableForWrite(uint32_t id){
+ for(const auto& c: _clients){
+ if(c->queueIsFull() && (c->id() == id )) return false;
+ }
+ return true;
+}
+
+size_t AsyncWebSocket::count() const {
+ return _clients.count_if([](AsyncWebSocketClient * c){
+ return c->status() == WS_CONNECTED;
+ });
+}
+
+AsyncWebSocketClient * AsyncWebSocket::client(uint32_t id){
+ for(const auto &c: _clients){
+ if(c->id() == id && c->status() == WS_CONNECTED){
+ return c;
+ }
+ }
+ return nullptr;
+}
+
+
+void AsyncWebSocket::close(uint32_t id, uint16_t code, const char * message){
+ AsyncWebSocketClient * c = client(id);
+ if(c)
+ c->close(code, message);
+}
+
+void AsyncWebSocket::closeAll(uint16_t code, const char * message){
+ for(const auto& c: _clients){
+ if(c->status() == WS_CONNECTED)
+ c->close(code, message);
+ }
+}
+
+void AsyncWebSocket::cleanupClients(uint16_t maxClients)
+{
+ if (count() > maxClients){
+ _clients.front()->close();
+ }
+}
+
+void AsyncWebSocket::ping(uint32_t id, uint8_t *data, size_t len){
+ AsyncWebSocketClient * c = client(id);
+ if(c)
+ c->ping(data, len);
+}
+
+void AsyncWebSocket::pingAll(uint8_t *data, size_t len){
+ for(const auto& c: _clients){
+ if(c->status() == WS_CONNECTED)
+ c->ping(data, len);
+ }
+}
+
+void AsyncWebSocket::text(uint32_t id, const char * message, size_t len){
+ AsyncWebSocketClient * c = client(id);
+ if(c)
+ c->text(message, len);
+}
+
+void AsyncWebSocket::textAll(AsyncWebSocketMessageBuffer * buffer){
+ if (!buffer) return;
+ buffer->lock();
+ for(const auto& c: _clients){
+ if(c->status() == WS_CONNECTED){
+ c->text(buffer);
+ }
+ }
+ buffer->unlock();
+ _cleanBuffers();
+}
+
+
+void AsyncWebSocket::textAll(const char * message, size_t len){
+ AsyncWebSocketMessageBuffer * WSBuffer = makeBuffer((uint8_t *)message, len);
+ textAll(WSBuffer);
+}
+
+void AsyncWebSocket::binary(uint32_t id, const char * message, size_t len){
+ AsyncWebSocketClient * c = client(id);
+ if(c)
+ c->binary(message, len);
+}
+
+void AsyncWebSocket::binaryAll(const char * message, size_t len){
+ AsyncWebSocketMessageBuffer * buffer = makeBuffer((uint8_t *)message, len);
+ binaryAll(buffer);
+}
+
+void AsyncWebSocket::binaryAll(AsyncWebSocketMessageBuffer * buffer)
+{
+ if (!buffer) return;
+ buffer->lock();
+ for(const auto& c: _clients){
+ if(c->status() == WS_CONNECTED)
+ c->binary(buffer);
+ }
+ buffer->unlock();
+ _cleanBuffers();
+}
+
+void AsyncWebSocket::message(uint32_t id, AsyncWebSocketMessage *message){
+ AsyncWebSocketClient * c = client(id);
+ if(c)
+ c->message(message);
+}
+
+void AsyncWebSocket::messageAll(AsyncWebSocketMultiMessage *message){
+ for(const auto& c: _clients){
+ if(c->status() == WS_CONNECTED)
+ c->message(message);
+ }
+ _cleanBuffers();
+}
+
+size_t AsyncWebSocket::printf(uint32_t id, const char *format, ...){
+ AsyncWebSocketClient * c = client(id);
+ if(c){
+ va_list arg;
+ va_start(arg, format);
+ size_t len = c->printf(format, arg);
+ va_end(arg);
+ return len;
+ }
+ return 0;
+}
+
+size_t AsyncWebSocket::printfAll(const char *format, ...) {
+ va_list arg;
+ char* temp = new char[MAX_PRINTF_LEN];
+ if(!temp){
+ return 0;
+ }
+ va_start(arg, format);
+ size_t len = vsnprintf(temp, MAX_PRINTF_LEN, format, arg);
+ va_end(arg);
+ delete[] temp;
+
+ AsyncWebSocketMessageBuffer * buffer = makeBuffer(len);
+ if (!buffer) {
+ return 0;
+ }
+
+ va_start(arg, format);
+ vsnprintf( (char *)buffer->get(), len + 1, format, arg);
+ va_end(arg);
+
+ textAll(buffer);
+ return len;
+}
+
+#ifndef ESP32
+size_t AsyncWebSocket::printf_P(uint32_t id, PGM_P formatP, ...){
+ AsyncWebSocketClient * c = client(id);
+ if(c != NULL){
+ va_list arg;
+ va_start(arg, formatP);
+ size_t len = c->printf_P(formatP, arg);
+ va_end(arg);
+ return len;
+ }
+ return 0;
+}
+#endif
+
+size_t AsyncWebSocket::printfAll_P(PGM_P formatP, ...) {
+ va_list arg;
+ char* temp = new char[MAX_PRINTF_LEN];
+ if(!temp){
+ return 0;
+ }
+ va_start(arg, formatP);
+ size_t len = vsnprintf_P(temp, MAX_PRINTF_LEN, formatP, arg);
+ va_end(arg);
+ delete[] temp;
+
+ AsyncWebSocketMessageBuffer * buffer = makeBuffer(len + 1);
+ if (!buffer) {
+ return 0;
+ }
+
+ va_start(arg, formatP);
+ vsnprintf_P((char *)buffer->get(), len + 1, formatP, arg);
+ va_end(arg);
+
+ textAll(buffer);
+ return len;
+}
+
+void AsyncWebSocket::text(uint32_t id, const char * message){
+ text(id, message, strlen(message));
+}
+void AsyncWebSocket::text(uint32_t id, uint8_t * message, size_t len){
+ text(id, (const char *)message, len);
+}
+void AsyncWebSocket::text(uint32_t id, char * message){
+ text(id, message, strlen(message));
+}
+void AsyncWebSocket::text(uint32_t id, const String &message){
+ text(id, message.c_str(), message.length());
+}
+void AsyncWebSocket::text(uint32_t id, const __FlashStringHelper *message){
+ AsyncWebSocketClient * c = client(id);
+ if(c != NULL)
+ c->text(message);
+}
+void AsyncWebSocket::textAll(const char * message){
+ textAll(message, strlen(message));
+}
+void AsyncWebSocket::textAll(uint8_t * message, size_t len){
+ textAll((const char *)message, len);
+}
+void AsyncWebSocket::textAll(char * message){
+ textAll(message, strlen(message));
+}
+void AsyncWebSocket::textAll(const String &message){
+ textAll(message.c_str(), message.length());
+}
+void AsyncWebSocket::textAll(const __FlashStringHelper *message){
+ for(const auto& c: _clients){
+ if(c->status() == WS_CONNECTED)
+ c->text(message);
+ }
+}
+void AsyncWebSocket::binary(uint32_t id, const char * message){
+ binary(id, message, strlen(message));
+}
+void AsyncWebSocket::binary(uint32_t id, uint8_t * message, size_t len){
+ binary(id, (const char *)message, len);
+}
+void AsyncWebSocket::binary(uint32_t id, char * message){
+ binary(id, message, strlen(message));
+}
+void AsyncWebSocket::binary(uint32_t id, const String &message){
+ binary(id, message.c_str(), message.length());
+}
+void AsyncWebSocket::binary(uint32_t id, const __FlashStringHelper *message, size_t len){
+ AsyncWebSocketClient * c = client(id);
+ if(c != NULL)
+ c-> binary(message, len);
+}
+void AsyncWebSocket::binaryAll(const char * message){
+ binaryAll(message, strlen(message));
+}
+void AsyncWebSocket::binaryAll(uint8_t * message, size_t len){
+ binaryAll((const char *)message, len);
+}
+void AsyncWebSocket::binaryAll(char * message){
+ binaryAll(message, strlen(message));
+}
+void AsyncWebSocket::binaryAll(const String &message){
+ binaryAll(message.c_str(), message.length());
+}
+void AsyncWebSocket::binaryAll(const __FlashStringHelper *message, size_t len){
+ for(const auto& c: _clients){
+ if(c->status() == WS_CONNECTED)
+ c-> binary(message, len);
+ }
+ }
+
+const char * WS_STR_CONNECTION = "Connection";
+const char * WS_STR_UPGRADE = "Upgrade";
+const char * WS_STR_ORIGIN = "Origin";
+const char * WS_STR_VERSION = "Sec-WebSocket-Version";
+const char * WS_STR_KEY = "Sec-WebSocket-Key";
+const char * WS_STR_PROTOCOL = "Sec-WebSocket-Protocol";
+const char * WS_STR_ACCEPT = "Sec-WebSocket-Accept";
+const char * WS_STR_UUID = "258EAFA5-E914-47DA-95CA-C5AB0DC85B11";
+
+bool AsyncWebSocket::canHandle(AsyncWebServerRequest *request){
+ if(!_enabled)
+ return false;
+
+ if(request->method() != HTTP_GET || !request->url().equals(_url) || !request->isExpectedRequestedConnType(RCT_WS))
+ return false;
+
+ request->addInterestingHeader(WS_STR_CONNECTION);
+ request->addInterestingHeader(WS_STR_UPGRADE);
+ request->addInterestingHeader(WS_STR_ORIGIN);
+ request->addInterestingHeader(WS_STR_VERSION);
+ request->addInterestingHeader(WS_STR_KEY);
+ request->addInterestingHeader(WS_STR_PROTOCOL);
+ return true;
+}
+
+void AsyncWebSocket::handleRequest(AsyncWebServerRequest *request){
+ if(!request->hasHeader(WS_STR_VERSION) || !request->hasHeader(WS_STR_KEY)){
+ request->send(400);
+ return;
+ }
+ if((_username != "" && _password != "") && !request->authenticate(_username.c_str(), _password.c_str())){
+ return request->requestAuthentication();
+ }
+ AsyncWebHeader* version = request->getHeader(WS_STR_VERSION);
+ if(version->value().toInt() != 13){
+ AsyncWebServerResponse *response = request->beginResponse(400);
+ response->addHeader(WS_STR_VERSION,"13");
+ request->send(response);
+ return;
+ }
+ AsyncWebHeader* key = request->getHeader(WS_STR_KEY);
+ AsyncWebServerResponse *response = new AsyncWebSocketResponse(key->value(), this);
+ if(request->hasHeader(WS_STR_PROTOCOL)){
+ AsyncWebHeader* protocol = request->getHeader(WS_STR_PROTOCOL);
+ //ToDo: check protocol
+ response->addHeader(WS_STR_PROTOCOL, protocol->value());
+ }
+ request->send(response);
+}
+
+AsyncWebSocketMessageBuffer * AsyncWebSocket::makeBuffer(size_t size)
+{
+ AsyncWebSocketMessageBuffer * buffer = new AsyncWebSocketMessageBuffer(size);
+ if (buffer) {
+ AsyncWebLockGuard l(_lock);
+ _buffers.add(buffer);
+ }
+ return buffer;
+}
+
+AsyncWebSocketMessageBuffer * AsyncWebSocket::makeBuffer(uint8_t * data, size_t size)
+{
+ AsyncWebSocketMessageBuffer * buffer = new AsyncWebSocketMessageBuffer(data, size);
+
+ if (buffer) {
+ AsyncWebLockGuard l(_lock);
+ _buffers.add(buffer);
+ }
+
+ return buffer;
+}
+
+void AsyncWebSocket::_cleanBuffers()
+{
+ AsyncWebLockGuard l(_lock);
+
+ for(AsyncWebSocketMessageBuffer * c: _buffers){
+ if(c && c->canDelete()){
+ _buffers.remove(c);
+ }
+ }
+}
+
+AsyncWebSocket::AsyncWebSocketClientAsyncLinkedList AsyncWebSocket::getClients() const {
+ return _clients;
+}
+
+/*
+ * Response to Web Socket request - sends the authorization and detaches the TCP Client from the web server
+ * Authentication code from https://github.com/Links2004/arduinoWebSockets/blob/master/src/WebSockets.cpp#L480
+ */
+
+AsyncWebSocketResponse::AsyncWebSocketResponse(const String& key, AsyncWebSocket *server){
+ _server = server;
+ _code = 101;
+ _sendContentLength = false;
+
+ uint8_t * hash = (uint8_t*)malloc(20);
+ if(hash == NULL){
+ _state = RESPONSE_FAILED;
+ return;
+ }
+ char * buffer = (char *) malloc(33);
+ if(buffer == NULL){
+ free(hash);
+ _state = RESPONSE_FAILED;
+ return;
+ }
+#ifdef ESP8266
+ sha1(key + WS_STR_UUID, hash);
+#else
+ (String&)key += WS_STR_UUID;
+ mbedtls_sha1_context ctx;
+ mbedtls_sha1_init(&ctx);
+ mbedtls_sha1_starts_ret(&ctx);
+ mbedtls_sha1_update_ret(&ctx, (const unsigned char*)key.c_str(), key.length());
+ mbedtls_sha1_finish_ret(&ctx, hash);
+ mbedtls_sha1_free(&ctx);
+#endif
+ base64_encodestate _state;
+ base64_init_encodestate(&_state);
+ int len = base64_encode_block((const char *) hash, 20, buffer, &_state);
+ len = base64_encode_blockend((buffer + len), &_state);
+ addHeader(WS_STR_CONNECTION, WS_STR_UPGRADE);
+ addHeader(WS_STR_UPGRADE, "websocket");
+ addHeader(WS_STR_ACCEPT,buffer);
+ free(buffer);
+ free(hash);
+}
+
+void AsyncWebSocketResponse::_respond(AsyncWebServerRequest *request){
+ if(_state == RESPONSE_FAILED){
+ request->client()->close(true);
+ return;
+ }
+ String out = _assembleHead(request->version());
+ request->client()->write(out.c_str(), _headLength);
+ _state = RESPONSE_WAIT_ACK;
+}
+
+size_t AsyncWebSocketResponse::_ack(AsyncWebServerRequest *request, size_t len, uint32_t time){
+ (void)time;
+ if(len){
+ new AsyncWebSocketClient(request, _server);
+ }
+ return 0;
+}
diff --git a/lib/libesp32/ESPAsyncWebServer/src/AsyncWebSocket.h b/lib/libesp32/ESPAsyncWebServer/src/AsyncWebSocket.h
new file mode 100644
index 000000000..7fb1e92de
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/src/AsyncWebSocket.h
@@ -0,0 +1,350 @@
+/*
+ Asynchronous WebServer library for Espressif MCUs
+
+ Copyright (c) 2016 Hristo Gochkov. All rights reserved.
+ This file is part of the esp8266 core for Arduino environment.
+
+ This library is free software; you can redistribute it and/or
+ modify it under the terms of the GNU Lesser General Public
+ License as published by the Free Software Foundation; either
+ version 2.1 of the License, or (at your option) any later version.
+
+ This library is distributed in the hope that it will be useful,
+ but WITHOUT ANY WARRANTY; without even the implied warranty of
+ MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
+ Lesser General Public License for more details.
+
+ You should have received a copy of the GNU Lesser General Public
+ License along with this library; if not, write to the Free Software
+ Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
+*/
+#ifndef ASYNCWEBSOCKET_H_
+#define ASYNCWEBSOCKET_H_
+
+#include
+#ifdef ESP32
+#include
+#define WS_MAX_QUEUED_MESSAGES 32
+#else
+#include
+#define WS_MAX_QUEUED_MESSAGES 8
+#endif
+#include
+
+#include "AsyncWebSynchronization.h"
+
+#ifdef ESP8266
+#include
+#ifdef CRYPTO_HASH_h // include Hash.h from espressif framework if the first include was from the crypto library
+#include <../src/Hash.h>
+#endif
+#endif
+
+#ifdef ESP32
+#define DEFAULT_MAX_WS_CLIENTS 8
+#else
+#define DEFAULT_MAX_WS_CLIENTS 4
+#endif
+
+class AsyncWebSocket;
+class AsyncWebSocketResponse;
+class AsyncWebSocketClient;
+class AsyncWebSocketControl;
+
+typedef struct {
+ /** Message type as defined by enum AwsFrameType.
+ * Note: Applications will only see WS_TEXT and WS_BINARY.
+ * All other types are handled by the library. */
+ uint8_t message_opcode;
+ /** Frame number of a fragmented message. */
+ uint32_t num;
+ /** Is this the last frame in a fragmented message ?*/
+ uint8_t final;
+ /** Is this frame masked? */
+ uint8_t masked;
+ /** Message type as defined by enum AwsFrameType.
+ * This value is the same as message_opcode for non-fragmented
+ * messages, but may also be WS_CONTINUATION in a fragmented message. */
+ uint8_t opcode;
+ /** Length of the current frame.
+ * This equals the total length of the message if num == 0 && final == true */
+ uint64_t len;
+ /** Mask key */
+ uint8_t mask[4];
+ /** Offset of the data inside the current frame. */
+ uint64_t index;
+} AwsFrameInfo;
+
+typedef enum { WS_DISCONNECTED, WS_CONNECTED, WS_DISCONNECTING } AwsClientStatus;
+typedef enum { WS_CONTINUATION, WS_TEXT, WS_BINARY, WS_DISCONNECT = 0x08, WS_PING, WS_PONG } AwsFrameType;
+typedef enum { WS_MSG_SENDING, WS_MSG_SENT, WS_MSG_ERROR } AwsMessageStatus;
+typedef enum { WS_EVT_CONNECT, WS_EVT_DISCONNECT, WS_EVT_PONG, WS_EVT_ERROR, WS_EVT_DATA } AwsEventType;
+
+class AsyncWebSocketMessageBuffer {
+ private:
+ uint8_t * _data;
+ size_t _len;
+ bool _lock;
+ uint32_t _count;
+
+ public:
+ AsyncWebSocketMessageBuffer();
+ AsyncWebSocketMessageBuffer(size_t size);
+ AsyncWebSocketMessageBuffer(uint8_t * data, size_t size);
+ AsyncWebSocketMessageBuffer(const AsyncWebSocketMessageBuffer &);
+ AsyncWebSocketMessageBuffer(AsyncWebSocketMessageBuffer &&);
+ ~AsyncWebSocketMessageBuffer();
+ void operator ++(int i) { (void)i; _count++; }
+ void operator --(int i) { (void)i; if (_count > 0) { _count--; } ; }
+ bool reserve(size_t size);
+ void lock() { _lock = true; }
+ void unlock() { _lock = false; }
+ uint8_t * get() { return _data; }
+ size_t length() { return _len; }
+ uint32_t count() { return _count; }
+ bool canDelete() { return (!_count && !_lock); }
+
+ friend AsyncWebSocket;
+
+};
+
+class AsyncWebSocketMessage {
+ protected:
+ uint8_t _opcode;
+ bool _mask;
+ AwsMessageStatus _status;
+ public:
+ AsyncWebSocketMessage():_opcode(WS_TEXT),_mask(false),_status(WS_MSG_ERROR){}
+ virtual ~AsyncWebSocketMessage(){}
+ virtual void ack(size_t len __attribute__((unused)), uint32_t time __attribute__((unused))){}
+ virtual size_t send(AsyncClient *client __attribute__((unused))){ return 0; }
+ virtual bool finished(){ return _status != WS_MSG_SENDING; }
+ virtual bool betweenFrames() const { return false; }
+};
+
+class AsyncWebSocketBasicMessage: public AsyncWebSocketMessage {
+ private:
+ size_t _len;
+ size_t _sent;
+ size_t _ack;
+ size_t _acked;
+ uint8_t * _data;
+public:
+ AsyncWebSocketBasicMessage(const char * data, size_t len, uint8_t opcode=WS_TEXT, bool mask=false);
+ AsyncWebSocketBasicMessage(uint8_t opcode=WS_TEXT, bool mask=false);
+ virtual ~AsyncWebSocketBasicMessage() override;
+ virtual bool betweenFrames() const override { return _acked == _ack; }
+ virtual void ack(size_t len, uint32_t time) override ;
+ virtual size_t send(AsyncClient *client) override ;
+};
+
+class AsyncWebSocketMultiMessage: public AsyncWebSocketMessage {
+ private:
+ uint8_t * _data;
+ size_t _len;
+ size_t _sent;
+ size_t _ack;
+ size_t _acked;
+ AsyncWebSocketMessageBuffer * _WSbuffer;
+public:
+ AsyncWebSocketMultiMessage(AsyncWebSocketMessageBuffer * buffer, uint8_t opcode=WS_TEXT, bool mask=false);
+ virtual ~AsyncWebSocketMultiMessage() override;
+ virtual bool betweenFrames() const override { return _acked == _ack; }
+ virtual void ack(size_t len, uint32_t time) override ;
+ virtual size_t send(AsyncClient *client) override ;
+};
+
+class AsyncWebSocketClient {
+ private:
+ AsyncClient *_client;
+ AsyncWebSocket *_server;
+ uint32_t _clientId;
+ AwsClientStatus _status;
+
+ AsyncLinkedList _controlQueue;
+ AsyncLinkedList _messageQueue;
+
+ uint8_t _pstate;
+ AwsFrameInfo _pinfo;
+
+ uint32_t _lastMessageTime;
+ uint32_t _keepAlivePeriod;
+
+ void _queueMessage(AsyncWebSocketMessage *dataMessage);
+ void _queueControl(AsyncWebSocketControl *controlMessage);
+ void _runQueue();
+
+ public:
+ void *_tempObject;
+
+ AsyncWebSocketClient(AsyncWebServerRequest *request, AsyncWebSocket *server);
+ ~AsyncWebSocketClient();
+
+ //client id increments for the given server
+ uint32_t id(){ return _clientId; }
+ AwsClientStatus status(){ return _status; }
+ AsyncClient* client(){ return _client; }
+ AsyncWebSocket *server(){ return _server; }
+ AwsFrameInfo const &pinfo() const { return _pinfo; }
+
+ IPAddress remoteIP();
+ uint16_t remotePort();
+
+ //control frames
+ void close(uint16_t code=0, const char * message=NULL);
+ void ping(uint8_t *data=NULL, size_t len=0);
+
+ //set auto-ping period in seconds. disabled if zero (default)
+ void keepAlivePeriod(uint16_t seconds){
+ _keepAlivePeriod = seconds * 1000;
+ }
+ uint16_t keepAlivePeriod(){
+ return (uint16_t)(_keepAlivePeriod / 1000);
+ }
+
+ //data packets
+ void message(AsyncWebSocketMessage *message){ _queueMessage(message); }
+ bool queueIsFull();
+
+ size_t printf(const char *format, ...) __attribute__ ((format (printf, 2, 3)));
+#ifndef ESP32
+ size_t printf_P(PGM_P formatP, ...) __attribute__ ((format (printf, 2, 3)));
+#endif
+ void text(const char * message, size_t len);
+ void text(const char * message);
+ void text(uint8_t * message, size_t len);
+ void text(char * message);
+ void text(const String &message);
+ void text(const __FlashStringHelper *data);
+ void text(AsyncWebSocketMessageBuffer *buffer);
+
+ void binary(const char * message, size_t len);
+ void binary(const char * message);
+ void binary(uint8_t * message, size_t len);
+ void binary(char * message);
+ void binary(const String &message);
+ void binary(const __FlashStringHelper *data, size_t len);
+ void binary(AsyncWebSocketMessageBuffer *buffer);
+
+ bool canSend() { return _messageQueue.length() < WS_MAX_QUEUED_MESSAGES; }
+
+ //system callbacks (do not call)
+ void _onAck(size_t len, uint32_t time);
+ void _onError(int8_t);
+ void _onPoll();
+ void _onTimeout(uint32_t time);
+ void _onDisconnect();
+ void _onData(void *pbuf, size_t plen);
+};
+
+typedef std::function AwsEventHandler;
+
+//WebServer Handler implementation that plays the role of a socket server
+class AsyncWebSocket: public AsyncWebHandler {
+ public:
+ typedef AsyncLinkedList AsyncWebSocketClientAsyncLinkedList;
+ private:
+ String _url;
+ AsyncWebSocketClientAsyncLinkedList _clients;
+ uint32_t _cNextId;
+ AwsEventHandler _eventHandler;
+ bool _enabled;
+ AsyncWebLock _lock;
+
+ public:
+ AsyncWebSocket(const String& url);
+ ~AsyncWebSocket();
+ const char * url() const { return _url.c_str(); }
+ void enable(bool e){ _enabled = e; }
+ bool enabled() const { return _enabled; }
+ bool availableForWriteAll();
+ bool availableForWrite(uint32_t id);
+
+ size_t count() const;
+ AsyncWebSocketClient * client(uint32_t id);
+ bool hasClient(uint32_t id){ return client(id) != NULL; }
+
+ void close(uint32_t id, uint16_t code=0, const char * message=NULL);
+ void closeAll(uint16_t code=0, const char * message=NULL);
+ void cleanupClients(uint16_t maxClients = DEFAULT_MAX_WS_CLIENTS);
+
+ void ping(uint32_t id, uint8_t *data=NULL, size_t len=0);
+ void pingAll(uint8_t *data=NULL, size_t len=0); // done
+
+ void text(uint32_t id, const char * message, size_t len);
+ void text(uint32_t id, const char * message);
+ void text(uint32_t id, uint8_t * message, size_t len);
+ void text(uint32_t id, char * message);
+ void text(uint32_t id, const String &message);
+ void text(uint32_t id, const __FlashStringHelper *message);
+
+ void textAll(const char * message, size_t len);
+ void textAll(const char * message);
+ void textAll(uint8_t * message, size_t len);
+ void textAll(char * message);
+ void textAll(const String &message);
+ void textAll(const __FlashStringHelper *message); // need to convert
+ void textAll(AsyncWebSocketMessageBuffer * buffer);
+
+ void binary(uint32_t id, const char * message, size_t len);
+ void binary(uint32_t id, const char * message);
+ void binary(uint32_t id, uint8_t * message, size_t len);
+ void binary(uint32_t id, char * message);
+ void binary(uint32_t id, const String &message);
+ void binary(uint32_t id, const __FlashStringHelper *message, size_t len);
+
+ void binaryAll(const char * message, size_t len);
+ void binaryAll(const char * message);
+ void binaryAll(uint8_t * message, size_t len);
+ void binaryAll(char * message);
+ void binaryAll(const String &message);
+ void binaryAll(const __FlashStringHelper *message, size_t len);
+ void binaryAll(AsyncWebSocketMessageBuffer * buffer);
+
+ void message(uint32_t id, AsyncWebSocketMessage *message);
+ void messageAll(AsyncWebSocketMultiMessage *message);
+
+ size_t printf(uint32_t id, const char *format, ...) __attribute__ ((format (printf, 3, 4)));
+ size_t printfAll(const char *format, ...) __attribute__ ((format (printf, 2, 3)));
+#ifndef ESP32
+ size_t printf_P(uint32_t id, PGM_P formatP, ...) __attribute__ ((format (printf, 3, 4)));
+#endif
+ size_t printfAll_P(PGM_P formatP, ...) __attribute__ ((format (printf, 2, 3)));
+
+ //event listener
+ void onEvent(AwsEventHandler handler){
+ _eventHandler = handler;
+ }
+
+ //system callbacks (do not call)
+ uint32_t _getNextId(){ return _cNextId++; }
+ void _addClient(AsyncWebSocketClient * client);
+ void _handleDisconnect(AsyncWebSocketClient * client);
+ void _handleEvent(AsyncWebSocketClient * client, AwsEventType type, void * arg, uint8_t *data, size_t len);
+ virtual bool canHandle(AsyncWebServerRequest *request) override final;
+ virtual void handleRequest(AsyncWebServerRequest *request) override final;
+
+
+ // messagebuffer functions/objects.
+ AsyncWebSocketMessageBuffer * makeBuffer(size_t size = 0);
+ AsyncWebSocketMessageBuffer * makeBuffer(uint8_t * data, size_t size);
+ AsyncLinkedList _buffers;
+ void _cleanBuffers();
+
+ AsyncWebSocketClientAsyncLinkedList getClients() const;
+};
+
+//WebServer response to authenticate the socket and detach the tcp client from the web server request
+class AsyncWebSocketResponse: public AsyncWebServerResponse {
+ private:
+ String _content;
+ AsyncWebSocket *_server;
+ public:
+ AsyncWebSocketResponse(const String& key, AsyncWebSocket *server);
+ void _respond(AsyncWebServerRequest *request);
+ size_t _ack(AsyncWebServerRequest *request, size_t len, uint32_t time);
+ bool _sourceValid() const { return true; }
+};
+
+
+#endif /* ASYNCWEBSOCKET_H_ */
diff --git a/lib/libesp32/ESPAsyncWebServer/src/AsyncWebSynchronization.h b/lib/libesp32/ESPAsyncWebServer/src/AsyncWebSynchronization.h
new file mode 100644
index 000000000..f36c52dcf
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/src/AsyncWebSynchronization.h
@@ -0,0 +1,87 @@
+#ifndef ASYNCWEBSYNCHRONIZATION_H_
+#define ASYNCWEBSYNCHRONIZATION_H_
+
+// Synchronisation is only available on ESP32, as the ESP8266 isn't using FreeRTOS by default
+
+#include
+
+#ifdef ESP32
+
+// This is the ESP32 version of the Sync Lock, using the FreeRTOS Semaphore
+class AsyncWebLock
+{
+private:
+ SemaphoreHandle_t _lock;
+ mutable void *_lockedBy;
+
+public:
+ AsyncWebLock() {
+ _lock = xSemaphoreCreateBinary();
+ _lockedBy = NULL;
+ xSemaphoreGive(_lock);
+ }
+
+ ~AsyncWebLock() {
+ vSemaphoreDelete(_lock);
+ }
+
+ bool lock() const {
+ extern void *pxCurrentTCB;
+ if (_lockedBy != pxCurrentTCB) {
+ xSemaphoreTake(_lock, portMAX_DELAY);
+ _lockedBy = pxCurrentTCB;
+ return true;
+ }
+ return false;
+ }
+
+ void unlock() const {
+ _lockedBy = NULL;
+ xSemaphoreGive(_lock);
+ }
+};
+
+#else
+
+// This is the 8266 version of the Sync Lock which is currently unimplemented
+class AsyncWebLock
+{
+
+public:
+ AsyncWebLock() {
+ }
+
+ ~AsyncWebLock() {
+ }
+
+ bool lock() const {
+ return false;
+ }
+
+ void unlock() const {
+ }
+};
+#endif
+
+class AsyncWebLockGuard
+{
+private:
+ const AsyncWebLock *_lock;
+
+public:
+ AsyncWebLockGuard(const AsyncWebLock &l) {
+ if (l.lock()) {
+ _lock = &l;
+ } else {
+ _lock = NULL;
+ }
+ }
+
+ ~AsyncWebLockGuard() {
+ if (_lock) {
+ _lock->unlock();
+ }
+ }
+};
+
+#endif // ASYNCWEBSYNCHRONIZATION_H_
\ No newline at end of file
diff --git a/lib/libesp32/ESPAsyncWebServer/src/ESPAsyncWebServer.h b/lib/libesp32/ESPAsyncWebServer/src/ESPAsyncWebServer.h
new file mode 100644
index 000000000..5f718c35c
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/src/ESPAsyncWebServer.h
@@ -0,0 +1,471 @@
+/*
+ Asynchronous WebServer library for Espressif MCUs
+
+ Copyright (c) 2016 Hristo Gochkov. All rights reserved.
+ This file is part of the esp8266 core for Arduino environment.
+
+ This library is free software; you can redistribute it and/or
+ modify it under the terms of the GNU Lesser General Public
+ License as published by the Free Software Foundation; either
+ version 2.1 of the License, or (at your option) any later version.
+
+ This library is distributed in the hope that it will be useful,
+ but WITHOUT ANY WARRANTY; without even the implied warranty of
+ MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
+ Lesser General Public License for more details.
+
+ You should have received a copy of the GNU Lesser General Public
+ License along with this library; if not, write to the Free Software
+ Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
+*/
+#ifndef _ESPAsyncWebServer_H_
+#define _ESPAsyncWebServer_H_
+
+#include "Arduino.h"
+
+#include
+#include "FS.h"
+
+#include "StringArray.h"
+
+#ifdef ESP32
+#include
+#include
+#elif defined(ESP8266)
+#include
+#include
+#else
+#error Platform not supported
+#endif
+
+#ifdef ASYNCWEBSERVER_REGEX
+#define ASYNCWEBSERVER_REGEX_ATTRIBUTE
+#else
+#define ASYNCWEBSERVER_REGEX_ATTRIBUTE __attribute__((warning("ASYNCWEBSERVER_REGEX not defined")))
+#endif
+
+#define DEBUGF(...) //Serial.printf(__VA_ARGS__)
+
+class AsyncWebServer;
+class AsyncWebServerRequest;
+class AsyncWebServerResponse;
+class AsyncWebHeader;
+class AsyncWebParameter;
+class AsyncWebRewrite;
+class AsyncWebHandler;
+class AsyncStaticWebHandler;
+class AsyncCallbackWebHandler;
+class AsyncResponseStream;
+
+#ifndef WEBSERVER_H
+typedef enum {
+ HTTP_GET = 0b00000001,
+ HTTP_POST = 0b00000010,
+ HTTP_DELETE = 0b00000100,
+ HTTP_PUT = 0b00001000,
+ HTTP_PATCH = 0b00010000,
+ HTTP_HEAD = 0b00100000,
+ HTTP_OPTIONS = 0b01000000,
+ HTTP_ANY = 0b01111111,
+} WebRequestMethod;
+#endif
+
+//if this value is returned when asked for data, packet will not be sent and you will be asked for data again
+#define RESPONSE_TRY_AGAIN 0xFFFFFFFF
+
+typedef uint8_t WebRequestMethodComposite;
+typedef std::function ArDisconnectHandler;
+
+/*
+ * PARAMETER :: Chainable object to hold GET/POST and FILE parameters
+ * */
+
+class AsyncWebParameter {
+ private:
+ String _name;
+ String _value;
+ size_t _size;
+ bool _isForm;
+ bool _isFile;
+
+ public:
+
+ AsyncWebParameter(const String& name, const String& value, bool form=false, bool file=false, size_t size=0): _name(name), _value(value), _size(size), _isForm(form), _isFile(file){}
+ const String& name() const { return _name; }
+ const String& value() const { return _value; }
+ size_t size() const { return _size; }
+ bool isPost() const { return _isForm; }
+ bool isFile() const { return _isFile; }
+};
+
+/*
+ * HEADER :: Chainable object to hold the headers
+ * */
+
+class AsyncWebHeader {
+ private:
+ String _name;
+ String _value;
+
+ public:
+ AsyncWebHeader(const String& name, const String& value): _name(name), _value(value){}
+ AsyncWebHeader(const String& data): _name(), _value(){
+ if(!data) return;
+ int index = data.indexOf(':');
+ if (index < 0) return;
+ _name = data.substring(0, index);
+ _value = data.substring(index + 2);
+ }
+ ~AsyncWebHeader(){}
+ const String& name() const { return _name; }
+ const String& value() const { return _value; }
+ String toString() const { return String(_name+": "+_value+"\r\n"); }
+};
+
+/*
+ * REQUEST :: Each incoming Client is wrapped inside a Request and both live together until disconnect
+ * */
+
+typedef enum { RCT_NOT_USED = -1, RCT_DEFAULT = 0, RCT_HTTP, RCT_WS, RCT_EVENT, RCT_MAX } RequestedConnectionType;
+
+typedef std::function AwsResponseFiller;
+typedef std::function AwsTemplateProcessor;
+
+class AsyncWebServerRequest {
+ using File = fs::File;
+ using FS = fs::FS;
+ friend class AsyncWebServer;
+ friend class AsyncCallbackWebHandler;
+ private:
+ AsyncClient* _client;
+ AsyncWebServer* _server;
+ AsyncWebHandler* _handler;
+ AsyncWebServerResponse* _response;
+ StringArray _interestingHeaders;
+ ArDisconnectHandler _onDisconnectfn;
+
+ String _temp;
+ uint8_t _parseState;
+
+ uint8_t _version;
+ WebRequestMethodComposite _method;
+ String _url;
+ String _host;
+ String _contentType;
+ String _boundary;
+ String _authorization;
+ RequestedConnectionType _reqconntype;
+ void _removeNotInterestingHeaders();
+ bool _isDigest;
+ bool _isMultipart;
+ bool _isPlainPost;
+ bool _expectingContinue;
+ size_t _contentLength;
+ size_t _parsedLength;
+
+ AsyncLinkedList _headers;
+ AsyncLinkedList _params;
+ AsyncLinkedList _pathParams;
+
+ uint8_t _multiParseState;
+ uint8_t _boundaryPosition;
+ size_t _itemStartIndex;
+ size_t _itemSize;
+ String _itemName;
+ String _itemFilename;
+ String _itemType;
+ String _itemValue;
+ uint8_t *_itemBuffer;
+ size_t _itemBufferIndex;
+ bool _itemIsFile;
+
+ void _onPoll();
+ void _onAck(size_t len, uint32_t time);
+ void _onError(int8_t error);
+ void _onTimeout(uint32_t time);
+ void _onDisconnect();
+ void _onData(void *buf, size_t len);
+
+ void _addParam(AsyncWebParameter*);
+ void _addPathParam(const char *param);
+
+ bool _parseReqHead();
+ bool _parseReqHeader();
+ void _parseLine();
+ void _parsePlainPostChar(uint8_t data);
+ void _parseMultipartPostByte(uint8_t data, bool last);
+ void _addGetParams(const String& params);
+
+ void _handleUploadStart();
+ void _handleUploadByte(uint8_t data, bool last);
+ void _handleUploadEnd();
+
+ public:
+ File _tempFile;
+ void *_tempObject;
+
+ AsyncWebServerRequest(AsyncWebServer*, AsyncClient*);
+ ~AsyncWebServerRequest();
+
+ AsyncClient* client(){ return _client; }
+ uint8_t version() const { return _version; }
+ WebRequestMethodComposite method() const { return _method; }
+ const String& url() const { return _url; }
+ const String& host() const { return _host; }
+ const String& contentType() const { return _contentType; }
+ size_t contentLength() const { return _contentLength; }
+ bool multipart() const { return _isMultipart; }
+ const char * methodToString() const;
+ const char * requestedConnTypeToString() const;
+ RequestedConnectionType requestedConnType() const { return _reqconntype; }
+ bool isExpectedRequestedConnType(RequestedConnectionType erct1, RequestedConnectionType erct2 = RCT_NOT_USED, RequestedConnectionType erct3 = RCT_NOT_USED);
+ void onDisconnect (ArDisconnectHandler fn);
+
+ //hash is the string representation of:
+ // base64(user:pass) for basic or
+ // user:realm:md5(user:realm:pass) for digest
+ bool authenticate(const char * hash);
+ bool authenticate(const char * username, const char * password, const char * realm = NULL, bool passwordIsHash = false);
+ void requestAuthentication(const char * realm = NULL, bool isDigest = true);
+
+ void setHandler(AsyncWebHandler *handler){ _handler = handler; }
+ void addInterestingHeader(const String& name);
+
+ void redirect(const String& url);
+
+ void send(AsyncWebServerResponse *response);
+ void send(int code, const String& contentType=String(), const String& content=String());
+ void send(FS &fs, const String& path, const String& contentType=String(), bool download=false, AwsTemplateProcessor callback=nullptr);
+ void send(File content, const String& path, const String& contentType=String(), bool download=false, AwsTemplateProcessor callback=nullptr);
+ void send(Stream &stream, const String& contentType, size_t len, AwsTemplateProcessor callback=nullptr);
+ void send(const String& contentType, size_t len, AwsResponseFiller callback, AwsTemplateProcessor templateCallback=nullptr);
+ void sendChunked(const String& contentType, AwsResponseFiller callback, AwsTemplateProcessor templateCallback=nullptr);
+ void send_P(int code, const String& contentType, const uint8_t * content, size_t len, AwsTemplateProcessor callback=nullptr);
+ void send_P(int code, const String& contentType, PGM_P content, AwsTemplateProcessor callback=nullptr);
+
+ AsyncWebServerResponse *beginResponse(int code, const String& contentType=String(), const String& content=String());
+ AsyncWebServerResponse *beginResponse(FS &fs, const String& path, const String& contentType=String(), bool download=false, AwsTemplateProcessor callback=nullptr);
+ AsyncWebServerResponse *beginResponse(File content, const String& path, const String& contentType=String(), bool download=false, AwsTemplateProcessor callback=nullptr);
+ AsyncWebServerResponse *beginResponse(Stream &stream, const String& contentType, size_t len, AwsTemplateProcessor callback=nullptr);
+ AsyncWebServerResponse *beginResponse(const String& contentType, size_t len, AwsResponseFiller callback, AwsTemplateProcessor templateCallback=nullptr);
+ AsyncWebServerResponse *beginChunkedResponse(const String& contentType, AwsResponseFiller callback, AwsTemplateProcessor templateCallback=nullptr);
+ AsyncResponseStream *beginResponseStream(const String& contentType, size_t bufferSize=1460);
+ AsyncWebServerResponse *beginResponse_P(int code, const String& contentType, const uint8_t * content, size_t len, AwsTemplateProcessor callback=nullptr);
+ AsyncWebServerResponse *beginResponse_P(int code, const String& contentType, PGM_P content, AwsTemplateProcessor callback=nullptr);
+
+ size_t headers() const; // get header count
+ bool hasHeader(const String& name) const; // check if header exists
+ bool hasHeader(const __FlashStringHelper * data) const; // check if header exists
+
+ AsyncWebHeader* getHeader(const String& name) const;
+ AsyncWebHeader* getHeader(const __FlashStringHelper * data) const;
+ AsyncWebHeader* getHeader(size_t num) const;
+
+ size_t params() const; // get arguments count
+ bool hasParam(const String& name, bool post=false, bool file=false) const;
+ bool hasParam(const __FlashStringHelper * data, bool post=false, bool file=false) const;
+
+ AsyncWebParameter* getParam(const String& name, bool post=false, bool file=false) const;
+ AsyncWebParameter* getParam(const __FlashStringHelper * data, bool post, bool file) const;
+ AsyncWebParameter* getParam(size_t num) const;
+
+ size_t args() const { return params(); } // get arguments count
+ const String& arg(const String& name) const; // get request argument value by name
+ const String& arg(const __FlashStringHelper * data) const; // get request argument value by F(name)
+ const String& arg(size_t i) const; // get request argument value by number
+ const String& argName(size_t i) const; // get request argument name by number
+ bool hasArg(const char* name) const; // check if argument exists
+ bool hasArg(const __FlashStringHelper * data) const; // check if F(argument) exists
+
+ const String& ASYNCWEBSERVER_REGEX_ATTRIBUTE pathArg(size_t i) const;
+
+ const String& header(const char* name) const;// get request header value by name
+ const String& header(const __FlashStringHelper * data) const;// get request header value by F(name)
+ const String& header(size_t i) const; // get request header value by number
+ const String& headerName(size_t i) const; // get request header name by number
+ String urlDecode(const String& text) const;
+};
+
+/*
+ * FILTER :: Callback to filter AsyncWebRewrite and AsyncWebHandler (done by the Server)
+ * */
+
+typedef std::function ArRequestFilterFunction;
+
+bool ON_STA_FILTER(AsyncWebServerRequest *request);
+
+bool ON_AP_FILTER(AsyncWebServerRequest *request);
+
+/*
+ * REWRITE :: One instance can be handle any Request (done by the Server)
+ * */
+
+class AsyncWebRewrite {
+ protected:
+ String _from;
+ String _toUrl;
+ String _params;
+ ArRequestFilterFunction _filter;
+ public:
+ AsyncWebRewrite(const char* from, const char* to): _from(from), _toUrl(to), _params(String()), _filter(NULL){
+ int index = _toUrl.indexOf('?');
+ if (index > 0) {
+ _params = _toUrl.substring(index +1);
+ _toUrl = _toUrl.substring(0, index);
+ }
+ }
+ virtual ~AsyncWebRewrite(){}
+ AsyncWebRewrite& setFilter(ArRequestFilterFunction fn) { _filter = fn; return *this; }
+ bool filter(AsyncWebServerRequest *request) const { return _filter == NULL || _filter(request); }
+ const String& from(void) const { return _from; }
+ const String& toUrl(void) const { return _toUrl; }
+ const String& params(void) const { return _params; }
+ virtual bool match(AsyncWebServerRequest *request) { return from() == request->url() && filter(request); }
+};
+
+/*
+ * HANDLER :: One instance can be attached to any Request (done by the Server)
+ * */
+
+class AsyncWebHandler {
+ protected:
+ ArRequestFilterFunction _filter;
+ String _username;
+ String _password;
+ public:
+ AsyncWebHandler():_username(""), _password(""){}
+ AsyncWebHandler& setFilter(ArRequestFilterFunction fn) { _filter = fn; return *this; }
+ AsyncWebHandler& setAuthentication(const char *username, const char *password){ _username = String(username);_password = String(password); return *this; };
+ bool filter(AsyncWebServerRequest *request){ return _filter == NULL || _filter(request); }
+ virtual ~AsyncWebHandler(){}
+ virtual bool canHandle(AsyncWebServerRequest *request __attribute__((unused))){
+ return false;
+ }
+ virtual void handleRequest(AsyncWebServerRequest *request __attribute__((unused))){}
+ virtual void handleUpload(AsyncWebServerRequest *request __attribute__((unused)), const String& filename __attribute__((unused)), size_t index __attribute__((unused)), uint8_t *data __attribute__((unused)), size_t len __attribute__((unused)), bool final __attribute__((unused))){}
+ virtual void handleBody(AsyncWebServerRequest *request __attribute__((unused)), uint8_t *data __attribute__((unused)), size_t len __attribute__((unused)), size_t index __attribute__((unused)), size_t total __attribute__((unused))){}
+ virtual bool isRequestHandlerTrivial(){return true;}
+};
+
+/*
+ * RESPONSE :: One instance is created for each Request (attached by the Handler)
+ * */
+
+typedef enum {
+ RESPONSE_SETUP, RESPONSE_HEADERS, RESPONSE_CONTENT, RESPONSE_WAIT_ACK, RESPONSE_END, RESPONSE_FAILED
+} WebResponseState;
+
+class AsyncWebServerResponse {
+ protected:
+ int _code;
+ AsyncLinkedList _headers;
+ String _contentType;
+ size_t _contentLength;
+ bool _sendContentLength;
+ bool _chunked;
+ size_t _headLength;
+ size_t _sentLength;
+ size_t _ackedLength;
+ size_t _writtenLength;
+ WebResponseState _state;
+ const char* _responseCodeToString(int code);
+
+ public:
+ AsyncWebServerResponse();
+ virtual ~AsyncWebServerResponse();
+ virtual void setCode(int code);
+ virtual void setContentLength(size_t len);
+ virtual void setContentType(const String& type);
+ virtual void addHeader(const String& name, const String& value);
+ virtual String _assembleHead(uint8_t version);
+ virtual bool _started() const;
+ virtual bool _finished() const;
+ virtual bool _failed() const;
+ virtual bool _sourceValid() const;
+ virtual void _respond(AsyncWebServerRequest *request);
+ virtual size_t _ack(AsyncWebServerRequest *request, size_t len, uint32_t time);
+};
+
+/*
+ * SERVER :: One instance
+ * */
+
+typedef std::function ArRequestHandlerFunction;
+typedef std::function ArUploadHandlerFunction;
+typedef std::function ArBodyHandlerFunction;
+
+class AsyncWebServer {
+ protected:
+ AsyncServer _server;
+ AsyncLinkedList _rewrites;
+ AsyncLinkedList _handlers;
+ AsyncCallbackWebHandler* _catchAllHandler;
+
+ public:
+ AsyncWebServer(uint16_t port);
+ ~AsyncWebServer();
+
+ void begin();
+ void end();
+
+#if ASYNC_TCP_SSL_ENABLED
+ void onSslFileRequest(AcSSlFileHandler cb, void* arg);
+ void beginSecure(const char *cert, const char *private_key_file, const char *password);
+#endif
+
+ AsyncWebRewrite& addRewrite(AsyncWebRewrite* rewrite);
+ bool removeRewrite(AsyncWebRewrite* rewrite);
+ AsyncWebRewrite& rewrite(const char* from, const char* to);
+
+ AsyncWebHandler& addHandler(AsyncWebHandler* handler);
+ bool removeHandler(AsyncWebHandler* handler);
+
+ AsyncCallbackWebHandler& on(const char* uri, ArRequestHandlerFunction onRequest);
+ AsyncCallbackWebHandler& on(const char* uri, WebRequestMethodComposite method, ArRequestHandlerFunction onRequest);
+ AsyncCallbackWebHandler& on(const char* uri, WebRequestMethodComposite method, ArRequestHandlerFunction onRequest, ArUploadHandlerFunction onUpload);
+ AsyncCallbackWebHandler& on(const char* uri, WebRequestMethodComposite method, ArRequestHandlerFunction onRequest, ArUploadHandlerFunction onUpload, ArBodyHandlerFunction onBody);
+
+ AsyncStaticWebHandler& serveStatic(const char* uri, fs::FS& fs, const char* path, const char* cache_control = NULL);
+
+ void onNotFound(ArRequestHandlerFunction fn); //called when handler is not assigned
+ void onFileUpload(ArUploadHandlerFunction fn); //handle file uploads
+ void onRequestBody(ArBodyHandlerFunction fn); //handle posts with plain body content (JSON often transmitted this way as a request)
+
+ void reset(); //remove all writers and handlers, with onNotFound/onFileUpload/onRequestBody
+
+ void _handleDisconnect(AsyncWebServerRequest *request);
+ void _attachHandler(AsyncWebServerRequest *request);
+ void _rewriteRequest(AsyncWebServerRequest *request);
+};
+
+class DefaultHeaders {
+ using headers_t = AsyncLinkedList;
+ headers_t _headers;
+
+ DefaultHeaders()
+ :_headers(headers_t([](AsyncWebHeader *h){ delete h; }))
+ {}
+public:
+ using ConstIterator = headers_t::ConstIterator;
+
+ void addHeader(const String& name, const String& value){
+ _headers.add(new AsyncWebHeader(name, value));
+ }
+
+ ConstIterator begin() const { return _headers.begin(); }
+ ConstIterator end() const { return _headers.end(); }
+
+ DefaultHeaders(DefaultHeaders const &) = delete;
+ DefaultHeaders &operator=(DefaultHeaders const &) = delete;
+ static DefaultHeaders &Instance() {
+ static DefaultHeaders instance;
+ return instance;
+ }
+};
+
+#include "WebResponseImpl.h"
+#include "WebHandlerImpl.h"
+#include "AsyncWebSocket.h"
+#include "AsyncEventSource.h"
+
+#endif /* _AsyncWebServer_H_ */
diff --git a/lib/libesp32/ESPAsyncWebServer/src/SPIFFSEditor.cpp b/lib/libesp32/ESPAsyncWebServer/src/SPIFFSEditor.cpp
new file mode 100644
index 000000000..a84fa87dd
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/src/SPIFFSEditor.cpp
@@ -0,0 +1,544 @@
+#include "SPIFFSEditor.h"
+#include
+
+//File: edit.htm.gz, Size: 4151
+#define edit_htm_gz_len 4151
+const uint8_t edit_htm_gz[] PROGMEM = {
+ 0x1F, 0x8B, 0x08, 0x08, 0xB8, 0x94, 0xB1, 0x59, 0x00, 0x03, 0x65, 0x64, 0x69, 0x74, 0x2E, 0x68,
+ 0x74, 0x6D, 0x00, 0xB5, 0x3A, 0x0B, 0x7B, 0xDA, 0xB8, 0xB2, 0x7F, 0xC5, 0x71, 0xCF, 0x66, 0xED,
+ 0x83, 0x31, 0x90, 0xA4, 0xD9, 0xD6, 0xC4, 0xC9, 0x42, 0x92, 0x36, 0x6D, 0xF3, 0x6A, 0x80, 0xB6,
+ 0x69, 0x4F, 0xEE, 0x7E, 0xC2, 0x16, 0xA0, 0xC6, 0x96, 0x5D, 0x5B, 0x0E, 0x49, 0x59, 0xFE, 0xFB,
+ 0x9D, 0x91, 0x6C, 0xB0, 0x09, 0x69, 0x77, 0xCF, 0xBD, 0xBB, 0xDD, 0x2D, 0x92, 0x46, 0x33, 0x9A,
+ 0x19, 0xCD, 0x53, 0xDE, 0xBD, 0x8D, 0xA3, 0x8B, 0xC3, 0xFE, 0xF5, 0xE5, 0xB1, 0x36, 0x11, 0x61,
+ 0xB0, 0xBF, 0x87, 0x7F, 0x6B, 0x01, 0xE1, 0x63, 0x97, 0xF2, 0xFD, 0x3D, 0xC1, 0x44, 0x40, 0xF7,
+ 0x8F, 0x7B, 0x97, 0xDA, 0xB1, 0xCF, 0x44, 0x94, 0xEC, 0x35, 0xD4, 0xCA, 0x5E, 0x2A, 0x1E, 0x02,
+ 0xAA, 0x85, 0xD4, 0x67, 0xC4, 0x4D, 0xBD, 0x84, 0xC2, 0x66, 0xDB, 0x0B, 0x67, 0xDF, 0xEB, 0x8C,
+ 0xFB, 0xF4, 0xDE, 0xD9, 0x6E, 0x36, 0xDB, 0x71, 0x94, 0x32, 0xC1, 0x22, 0xEE, 0x90, 0x61, 0x1A,
+ 0x05, 0x99, 0xA0, 0xED, 0x80, 0x8E, 0x84, 0xF3, 0x3C, 0xBE, 0x6F, 0x0F, 0xA3, 0xC4, 0xA7, 0x89,
+ 0xD3, 0x8A, 0xEF, 0x35, 0x00, 0x31, 0x5F, 0x7B, 0xB6, 0xB3, 0xB3, 0xD3, 0x1E, 0x12, 0xEF, 0x76,
+ 0x9C, 0x44, 0x19, 0xF7, 0xEB, 0x5E, 0x14, 0x44, 0x89, 0xF3, 0x6C, 0xF4, 0x1C, 0xFF, 0xB4, 0x7D,
+ 0x96, 0xC6, 0x01, 0x79, 0x70, 0x78, 0xC4, 0x29, 0xE0, 0xDE, 0xD7, 0xD3, 0x09, 0xF1, 0xA3, 0xA9,
+ 0xD3, 0xD4, 0x9A, 0x5A, 0xAB, 0x09, 0x44, 0x92, 0xF1, 0x90, 0x18, 0x4D, 0x0B, 0xFF, 0xD8, 0x3B,
+ 0x66, 0x7B, 0x14, 0x71, 0x51, 0x4F, 0xD9, 0x77, 0xEA, 0xB4, 0xB6, 0xE0, 0x34, 0x39, 0x1D, 0x91,
+ 0x90, 0x05, 0x0F, 0x4E, 0x4A, 0x78, 0x5A, 0x4F, 0x69, 0xC2, 0x46, 0x6A, 0x79, 0x4A, 0xD9, 0x78,
+ 0x22, 0x9C, 0xDF, 0x9A, 0xCD, 0x39, 0xF0, 0xAF, 0x65, 0xC1, 0x2C, 0x60, 0x29, 0x20, 0xA3, 0x78,
+ 0xEA, 0x3C, 0x11, 0xC5, 0x4E, 0x53, 0xB1, 0xDE, 0x6C, 0x87, 0x24, 0x19, 0x33, 0x0E, 0x83, 0x98,
+ 0xF8, 0x3E, 0xE3, 0x63, 0x47, 0xA1, 0x05, 0x6C, 0xB6, 0x90, 0x36, 0xA1, 0x01, 0x11, 0xEC, 0x8E,
+ 0xB6, 0x43, 0xC6, 0xEB, 0x53, 0xE6, 0x8B, 0x89, 0xB3, 0x0B, 0x3C, 0xB6, 0xBD, 0x2C, 0x49, 0x41,
+ 0xA6, 0x38, 0x62, 0x5C, 0xD0, 0x44, 0xA2, 0xA5, 0x31, 0xE1, 0xB3, 0x5C, 0x54, 0x54, 0x40, 0x21,
+ 0x27, 0xE3, 0x01, 0xE3, 0xB4, 0x3E, 0x0C, 0x22, 0xEF, 0x76, 0x71, 0xD2, 0x6E, 0x7C, 0x9F, 0x9F,
+ 0xE5, 0x4C, 0xA2, 0x3B, 0x9A, 0xCC, 0x96, 0xEA, 0x92, 0xD8, 0x15, 0x60, 0x85, 0x34, 0xA5, 0x74,
+ 0x6E, 0x8B, 0xBB, 0x0C, 0xA0, 0x96, 0xFC, 0x05, 0x29, 0x17, 0xFC, 0x2F, 0x45, 0x5A, 0x11, 0x5C,
+ 0xA1, 0x30, 0x1E, 0x67, 0x62, 0xF6, 0xF8, 0x2A, 0xA3, 0x98, 0x78, 0x4C, 0x3C, 0xA0, 0xFC, 0xB0,
+ 0x6D, 0x86, 0xBA, 0x04, 0xAC, 0x24, 0x24, 0x81, 0x86, 0x3A, 0xD7, 0x3E, 0xD0, 0xC4, 0x27, 0x9C,
+ 0x58, 0x9D, 0x84, 0x91, 0xC0, 0xEA, 0x2D, 0xB5, 0x5E, 0x0F, 0xA3, 0xEF, 0xF5, 0x0C, 0xC6, 0x30,
+ 0x0F, 0xA8, 0x27, 0x94, 0x92, 0xE1, 0x1E, 0x86, 0xB7, 0x4C, 0x3C, 0x06, 0x3C, 0x5A, 0x28, 0xA9,
+ 0x4B, 0x2A, 0x69, 0xA2, 0x2E, 0xB0, 0x25, 0xD5, 0x83, 0x1C, 0x4B, 0xC9, 0x95, 0x50, 0xF5, 0x61,
+ 0x24, 0x44, 0x14, 0x4A, 0x93, 0x5B, 0x08, 0xAC, 0x49, 0xAB, 0x79, 0xF1, 0xE8, 0x46, 0xD6, 0x6B,
+ 0xBF, 0x44, 0xBE, 0x0D, 0x7A, 0x15, 0xCC, 0x23, 0x41, 0x9D, 0x04, 0x6C, 0xCC, 0x9D, 0x90, 0xF9,
+ 0x7E, 0x40, 0x4B, 0x56, 0xEB, 0x64, 0x49, 0x60, 0xF8, 0x44, 0x10, 0x87, 0x85, 0x64, 0x4C, 0x1B,
+ 0x31, 0x1F, 0x03, 0x34, 0xA5, 0xBB, 0x3B, 0x16, 0xFB, 0xD0, 0xBD, 0xB8, 0x9A, 0x36, 0xDF, 0xBD,
+ 0x1E, 0x47, 0x1D, 0xF8, 0xE7, 0xBC, 0x37, 0x98, 0x1C, 0x0F, 0xC6, 0x30, 0xEA, 0xE2, 0xB4, 0xF3,
+ 0xFE, 0xB0, 0xF3, 0x1E, 0x7E, 0x0E, 0x5B, 0xB5, 0xAF, 0xA3, 0x6F, 0xB8, 0xD0, 0x7D, 0xED, 0x77,
+ 0xFB, 0x83, 0xE3, 0x4E, 0xE7, 0x5D, 0xE3, 0xCD, 0xF9, 0xF4, 0xE3, 0xBB, 0x5D, 0x04, 0x77, 0x83,
+ 0xE6, 0xD5, 0x87, 0x49, 0x73, 0xB0, 0xF5, 0x32, 0xF4, 0x4F, 0xFC, 0x89, 0x17, 0x0E, 0x3A, 0xEF,
+ 0x3F, 0x5E, 0xDD, 0x5D, 0x87, 0x83, 0x71, 0xEF, 0x63, 0x6B, 0xF2, 0x79, 0xEB, 0x43, 0xEF, 0xF3,
+ 0xC7, 0x57, 0xB7, 0xF4, 0xD3, 0xC9, 0xDB, 0xCF, 0xFD, 0x29, 0x20, 0x1C, 0x45, 0xBD, 0xC1, 0x55,
+ 0xF7, 0x43, 0x77, 0xFC, 0xB9, 0xEB, 0x1D, 0xDF, 0x0F, 0x83, 0xF3, 0xEE, 0xEB, 0xCE, 0xB0, 0xB3,
+ 0xE5, 0x51, 0x3A, 0xEE, 0x5F, 0x75, 0xB3, 0x37, 0xEF, 0x2E, 0xC6, 0x8C, 0x4D, 0x7A, 0x9F, 0xCF,
+ 0xFB, 0xDE, 0xE1, 0xF3, 0xD3, 0xC1, 0x49, 0x87, 0x4D, 0xCE, 0xDF, 0x5E, 0x35, 0x6F, 0x5F, 0xBF,
+ 0x3B, 0x3C, 0xF2, 0xAE, 0xDF, 0x5E, 0xEF, 0x1E, 0x6D, 0x37, 0x7E, 0xFB, 0xED, 0xCC, 0xBF, 0x60,
+ 0xBC, 0x7F, 0xF7, 0xBD, 0x33, 0x3E, 0x9C, 0xBE, 0x78, 0x48, 0xFB, 0x93, 0x37, 0x77, 0xBC, 0xF1,
+ 0x21, 0xFA, 0xFA, 0xE6, 0xE1, 0x0C, 0xFE, 0xBB, 0xBC, 0xAC, 0x0D, 0x7B, 0xAD, 0x74, 0xF0, 0xFE,
+ 0xCD, 0x87, 0xAD, 0xF4, 0xE5, 0xF3, 0xB8, 0x7B, 0x74, 0x74, 0x17, 0x0E, 0x2F, 0x1B, 0xA1, 0x7F,
+ 0x3B, 0x12, 0x2F, 0xB6, 0x45, 0x7C, 0x3D, 0xCE, 0x3E, 0x7F, 0x7B, 0xFE, 0x76, 0xD2, 0xB8, 0xA0,
+ 0xE4, 0x7A, 0x52, 0x7B, 0xF8, 0xFE, 0xF0, 0x62, 0xD2, 0x3F, 0xB9, 0x3B, 0x0F, 0xC8, 0xFD, 0xF9,
+ 0xB9, 0xF7, 0x3D, 0xAC, 0x05, 0xE4, 0xE5, 0x45, 0x3F, 0x20, 0x49, 0x6B, 0xE0, 0x77, 0x1A, 0xB5,
+ 0xC3, 0xAD, 0xCE, 0x8E, 0x48, 0xAE, 0x0E, 0xF9, 0xD1, 0xF6, 0xD7, 0xDE, 0x8B, 0x6E, 0xB7, 0x15,
+ 0x0D, 0xBF, 0x6D, 0xBD, 0xBE, 0xDD, 0x7D, 0x3D, 0xD8, 0x7D, 0x3F, 0x7C, 0xDF, 0xE9, 0xED, 0x74,
+ 0x07, 0xE4, 0xBA, 0xF7, 0xBE, 0x33, 0xDA, 0x19, 0x4E, 0x26, 0xEF, 0xDE, 0xF5, 0x5F, 0xF9, 0x9D,
+ 0xEF, 0x49, 0xE7, 0x62, 0xDA, 0xB9, 0x3F, 0x1E, 0x74, 0x4E, 0x6A, 0xEF, 0x8E, 0xCF, 0x9A, 0xAD,
+ 0xDE, 0xF5, 0xF6, 0xF8, 0x6C, 0x77, 0xDA, 0x4D, 0x8F, 0x3B, 0xEF, 0xBB, 0xCD, 0xF1, 0xDB, 0x5A,
+ 0x48, 0x3E, 0x47, 0x87, 0xDB, 0xE3, 0x37, 0xBB, 0xEC, 0xF2, 0x9A, 0x74, 0xDE, 0x74, 0xDF, 0xA6,
+ 0xEC, 0x2A, 0x3C, 0x19, 0x34, 0x3B, 0x9D, 0xD3, 0x0B, 0xFA, 0xEA, 0x70, 0x9B, 0xBC, 0xDB, 0xF2,
+ 0x3E, 0x82, 0xFE, 0x07, 0x9F, 0xE8, 0x6F, 0xB5, 0xCE, 0xF4, 0xA2, 0x19, 0x78, 0x2F, 0x69, 0xFF,
+ 0xE4, 0xBA, 0x2F, 0x6F, 0xE7, 0x38, 0x78, 0xD5, 0xBF, 0xED, 0x65, 0xEF, 0xC3, 0xC3, 0x43, 0x53,
+ 0xE3, 0x51, 0x3D, 0xA1, 0x31, 0x25, 0xA2, 0x1C, 0xAE, 0x16, 0xFE, 0x01, 0xB6, 0xB5, 0xB4, 0xC2,
+ 0xDC, 0x4F, 0x05, 0xBD, 0x17, 0x75, 0x9F, 0x7A, 0x51, 0x42, 0xE4, 0x1E, 0x40, 0xA0, 0x09, 0x9A,
+ 0xD8, 0xFC, 0x77, 0x19, 0x3F, 0x35, 0x15, 0x3F, 0x35, 0xC2, 0x7D, 0xCD, 0x28, 0x1C, 0x01, 0x83,
+ 0x87, 0x4F, 0xEF, 0x98, 0x47, 0xEB, 0x31, 0xBB, 0xA7, 0x41, 0x5D, 0x22, 0x3B, 0x4D, 0x73, 0x26,
+ 0xFD, 0xAD, 0xD8, 0x46, 0x38, 0x98, 0x9A, 0xA4, 0x5A, 0x2C, 0xF8, 0x5F, 0x89, 0x47, 0x21, 0xB0,
+ 0x81, 0xCB, 0x84, 0xF8, 0xAB, 0x7C, 0x27, 0x4A, 0xEA, 0xC3, 0x6C, 0x3C, 0x62, 0xF7, 0xE0, 0xD0,
+ 0x23, 0xC6, 0x99, 0xA0, 0x5A, 0x2B, 0x9D, 0xFF, 0x5E, 0x90, 0xB9, 0xA5, 0x0F, 0xA3, 0x84, 0x84,
+ 0x34, 0xD5, 0xFE, 0x22, 0x99, 0xD9, 0x28, 0x89, 0xC2, 0x65, 0x10, 0x99, 0x8B, 0xA8, 0x34, 0x99,
+ 0xCF, 0x9F, 0x65, 0x71, 0x10, 0x11, 0x10, 0x73, 0x4D, 0xE4, 0x50, 0xF1, 0x34, 0x91, 0x6E, 0xB5,
+ 0x88, 0xAB, 0xB9, 0x9B, 0x6D, 0xA1, 0x5B, 0x96, 0xDD, 0x7A, 0x6B, 0x67, 0xE9, 0xBA, 0x75, 0xB9,
+ 0x17, 0xE3, 0xFD, 0x9A, 0x4C, 0x81, 0xF1, 0xA0, 0x14, 0xEE, 0x9E, 0x09, 0x50, 0xE9, 0x13, 0x87,
+ 0xCB, 0x43, 0xF2, 0xC8, 0xB0, 0x60, 0x40, 0x05, 0xEA, 0x96, 0x8C, 0xD4, 0x85, 0x24, 0xB0, 0x6F,
+ 0xFE, 0x8C, 0xCA, 0xBC, 0x67, 0x3D, 0x8B, 0x13, 0xB8, 0x0D, 0x3A, 0xFD, 0x11, 0xCD, 0x42, 0xA6,
+ 0x2A, 0x6D, 0x45, 0x53, 0x65, 0xBC, 0x5C, 0x84, 0x65, 0xDA, 0x93, 0xBC, 0x16, 0xA4, 0x1F, 0x4B,
+ 0x05, 0xE0, 0x05, 0x37, 0xCF, 0x91, 0x9B, 0x1F, 0x6A, 0x75, 0x7B, 0xF7, 0x97, 0x9C, 0x87, 0x9D,
+ 0xE6, 0x2F, 0x73, 0x3B, 0xDF, 0x5B, 0xA4, 0xE4, 0x56, 0x13, 0xFE, 0x29, 0x32, 0xEF, 0x8B, 0x25,
+ 0x0B, 0xC3, 0xE7, 0xF8, 0xA7, 0x60, 0x10, 0xE9, 0x94, 0x80, 0xDB, 0x3B, 0x2F, 0x5F, 0xF8, 0xC3,
+ 0x02, 0x98, 0x0B, 0xF6, 0x24, 0x3C, 0x21, 0x3E, 0xCB, 0x52, 0xE7, 0x79, 0xF3, 0x97, 0x5C, 0x9F,
+ 0x5B, 0x3B, 0x28, 0xFB, 0xE2, 0x2E, 0x71, 0xB2, 0xB4, 0xD8, 0x34, 0x66, 0x5C, 0xDB, 0x4A, 0x35,
+ 0xBC, 0x6F, 0x92, 0x2C, 0x0C, 0xB3, 0x92, 0xED, 0xE7, 0xBF, 0x2F, 0x4D, 0x13, 0xF7, 0xCF, 0x9A,
+ 0xBF, 0xCC, 0x44, 0x02, 0xD9, 0x64, 0x04, 0xB9, 0xC6, 0x49, 0x22, 0x41, 0x04, 0x35, 0x9A, 0xE6,
+ 0x1C, 0x84, 0x5B, 0x03, 0xD8, 0xDE, 0x6D, 0xFA, 0x74, 0x6C, 0xCE, 0xE7, 0x7B, 0x0D, 0x99, 0xD7,
+ 0xA0, 0x6C, 0xF1, 0x12, 0x16, 0x8B, 0xFD, 0x51, 0xC6, 0x3D, 0xE4, 0x41, 0x1B, 0x53, 0x83, 0x9A,
+ 0xB3, 0x84, 0x8A, 0x2C, 0xE1, 0x9A, 0x1F, 0x79, 0x19, 0x1A, 0xBB, 0x3D, 0xA6, 0xE2, 0x58, 0xD9,
+ 0x7D, 0xF7, 0xE1, 0x8D, 0x0F, 0x3B, 0xE6, 0x0B, 0x04, 0x6F, 0x2D, 0x02, 0x38, 0x30, 0x9C, 0x97,
+ 0xE3, 0x54, 0xF6, 0x43, 0x82, 0x01, 0x22, 0xEF, 0xE8, 0x83, 0x41, 0x2D, 0xB1, 0x40, 0xA4, 0x36,
+ 0xAE, 0x1B, 0xC5, 0x2E, 0x80, 0x71, 0x73, 0x76, 0x07, 0x4A, 0x20, 0x2E, 0xFD, 0x22, 0x6E, 0x2C,
+ 0xE6, 0x72, 0xF8, 0x69, 0xE7, 0xBB, 0xC9, 0x1E, 0x3B, 0xA8, 0xB7, 0x1C, 0xB2, 0xCF, 0x0E, 0x5A,
+ 0xE0, 0x5E, 0x65, 0x6E, 0xE4, 0xB9, 0xAF, 0x58, 0x40, 0x07, 0xB9, 0xC3, 0xE1, 0x31, 0x48, 0x6C,
+ 0xB1, 0x85, 0x28, 0xE2, 0x5B, 0xCD, 0xE6, 0x86, 0x4B, 0x0F, 0x48, 0x00, 0x39, 0xCC, 0xD0, 0x8F,
+ 0xAF, 0xAE, 0x2E, 0xAE, 0xBE, 0xE8, 0x35, 0x5A, 0xD3, 0x6F, 0x1C, 0x4D, 0xAF, 0x71, 0xD3, 0x11,
+ 0x76, 0x42, 0x47, 0x09, 0x4D, 0x27, 0x97, 0x44, 0x4C, 0x8C, 0xD4, 0xBE, 0x23, 0x41, 0x56, 0x16,
+ 0x84, 0xA1, 0xDC, 0xC8, 0xA2, 0x70, 0x39, 0x9D, 0x6A, 0xAF, 0x40, 0xCD, 0x47, 0x90, 0xEA, 0xDA,
+ 0xC2, 0x26, 0x71, 0x4C, 0xB9, 0x6F, 0xE8, 0x31, 0x20, 0xEA, 0x16, 0x35, 0xAD, 0x84, 0x7E, 0xCB,
+ 0x68, 0x2A, 0x52, 0x1B, 0x2C, 0xD7, 0xD0, 0x2F, 0x07, 0x7D, 0xDD, 0xD2, 0x1B, 0xE8, 0x47, 0x3A,
+ 0xF0, 0x46, 0xCC, 0x39, 0x52, 0x89, 0x5C, 0xD0, 0xA4, 0x3E, 0xCC, 0xC0, 0xA0, 0xB8, 0x6E, 0xB6,
+ 0x23, 0x9B, 0x71, 0x4E, 0x93, 0x93, 0xFE, 0xD9, 0xA9, 0xAB, 0x5F, 0x29, 0x46, 0xB4, 0x53, 0x28,
+ 0x48, 0x74, 0x4B, 0x5E, 0x51, 0x7E, 0xC8, 0xE1, 0x84, 0x05, 0xBE, 0x11, 0x99, 0x6D, 0x24, 0xE1,
+ 0x49, 0x12, 0xB2, 0x40, 0x01, 0x0A, 0x9E, 0x2D, 0x1E, 0x62, 0xEA, 0xEA, 0x23, 0x50, 0x86, 0x6E,
+ 0x79, 0x76, 0x98, 0x05, 0x82, 0xC5, 0x01, 0x75, 0x37, 0x5A, 0x30, 0xE3, 0x60, 0x41, 0xAE, 0x8E,
+ 0xB9, 0x19, 0x61, 0xCC, 0x77, 0x75, 0x15, 0xA1, 0xF2, 0xB8, 0xB6, 0xEE, 0x14, 0x4F, 0x9D, 0x92,
+ 0x56, 0x4E, 0x49, 0xCB, 0xB8, 0x4A, 0xE0, 0x34, 0x3F, 0x18, 0xC3, 0x3C, 0xCE, 0xD4, 0x51, 0x05,
+ 0xCC, 0xA7, 0x23, 0x02, 0x9C, 0x7C, 0x40, 0x6D, 0xBA, 0x7A, 0x63, 0xDD, 0x41, 0xA9, 0x3A, 0xC8,
+ 0xAF, 0x6A, 0xC4, 0x2F, 0x6B, 0x44, 0xDD, 0xEE, 0x3A, 0x64, 0x5F, 0x21, 0x07, 0x55, 0xE4, 0xA0,
+ 0x8C, 0x7C, 0x28, 0x8D, 0x64, 0x1D, 0x72, 0xA0, 0x90, 0x93, 0x8A, 0x88, 0x89, 0x14, 0x51, 0x85,
+ 0xBD, 0x3A, 0x6A, 0x13, 0x05, 0xD2, 0xAD, 0xA4, 0x22, 0x66, 0x62, 0x83, 0x97, 0x92, 0x61, 0x40,
+ 0x7D, 0x77, 0xA3, 0x09, 0x33, 0x2C, 0xB6, 0xDD, 0xAD, 0xE6, 0x9A, 0x33, 0x12, 0x75, 0x46, 0x56,
+ 0x65, 0x30, 0x2B, 0x33, 0xA8, 0xF5, 0xC8, 0x1D, 0xD5, 0xD6, 0x31, 0x98, 0x99, 0x56, 0x60, 0x47,
+ 0xDC, 0x0B, 0x98, 0x77, 0xEB, 0x2E, 0xBD, 0xC5, 0x9C, 0xB1, 0x85, 0x85, 0x5A, 0x5C, 0x06, 0xBA,
+ 0x01, 0x94, 0x5E, 0x8B, 0xA5, 0x7C, 0x80, 0xFA, 0x9E, 0x5B, 0xD9, 0x5A, 0x02, 0xDC, 0xA6, 0xF7,
+ 0xD4, 0x3B, 0x8C, 0xC2, 0x90, 0xA0, 0xED, 0xA6, 0xC0, 0x41, 0x3E, 0xD1, 0xCD, 0xB9, 0x15, 0xAD,
+ 0xC5, 0x79, 0xC2, 0x45, 0x2C, 0x7F, 0x3D, 0x8B, 0x23, 0x03, 0x5C, 0xCE, 0xF5, 0x6C, 0xD4, 0x61,
+ 0x6A, 0x83, 0x1E, 0xC7, 0x62, 0xF2, 0x13, 0x17, 0x2A, 0x0C, 0x54, 0xA2, 0x7C, 0x69, 0xDE, 0x58,
+ 0x0B, 0x91, 0x56, 0x7C, 0xEA, 0xA2, 0xB7, 0xE2, 0x54, 0xA8, 0xBC, 0x8A, 0x5D, 0x9A, 0x4B, 0x1D,
+ 0x94, 0x61, 0xB9, 0xBD, 0x2F, 0xA0, 0xFA, 0x7C, 0x0E, 0xE7, 0x01, 0xFF, 0x13, 0x68, 0xF9, 0xE8,
+ 0x5F, 0x17, 0x60, 0xC9, 0xA3, 0x34, 0x78, 0x8B, 0xBB, 0x0D, 0xE3, 0xC0, 0xF9, 0x8F, 0x6D, 0x7C,
+ 0xF9, 0x1F, 0xFB, 0xA6, 0x66, 0x9A, 0x07, 0xFF, 0x6A, 0x48, 0x0D, 0x1B, 0xC2, 0xFC, 0xD2, 0xBA,
+ 0xB1, 0x08, 0x80, 0xED, 0x7F, 0x9B, 0xFF, 0xB1, 0x25, 0xB8, 0x02, 0x6B, 0xDF, 0x45, 0x90, 0x49,
+ 0xF0, 0x24, 0x34, 0xB0, 0x68, 0xA4, 0x91, 0xCD, 0x4D, 0x43, 0xB8, 0xA4, 0x72, 0x8D, 0x35, 0x51,
+ 0xD3, 0x6D, 0x88, 0x53, 0x50, 0x5B, 0xAC, 0x04, 0xBF, 0x3E, 0x24, 0x7A, 0x15, 0x5B, 0x17, 0x00,
+ 0xC9, 0x3D, 0xCA, 0x0C, 0x3D, 0x22, 0x97, 0x52, 0xCB, 0x0C, 0x02, 0x42, 0xA7, 0x89, 0xE7, 0x2A,
+ 0xAD, 0x1D, 0x14, 0x30, 0x17, 0xA2, 0xE0, 0xBC, 0x1C, 0x2D, 0x15, 0xEA, 0xAA, 0xFD, 0x17, 0x0A,
+ 0xA3, 0xD6, 0x12, 0x8A, 0x04, 0x31, 0xAD, 0xD8, 0x79, 0xC6, 0x72, 0x75, 0x4C, 0x59, 0xBA, 0x35,
+ 0x59, 0x5D, 0x96, 0xAD, 0x04, 0xAE, 0x2F, 0x8D, 0xFE, 0xD7, 0x3D, 0x16, 0x8E, 0xB5, 0x12, 0x3F,
+ 0xF8, 0x97, 0xFB, 0x2B, 0x46, 0xE4, 0xCD, 0x3F, 0xBC, 0x21, 0x70, 0x05, 0xA6, 0x41, 0x6D, 0x1E,
+ 0x4D, 0x0D, 0xB3, 0xF6, 0xAB, 0xAE, 0x49, 0x8A, 0xAE, 0x1E, 0x92, 0xFB, 0xBC, 0xA7, 0xC4, 0x8C,
+ 0xD7, 0xD6, 0x70, 0x5E, 0xB4, 0x28, 0xF9, 0x82, 0xEC, 0xE6, 0x48, 0x26, 0xA2, 0xB6, 0x56, 0x64,
+ 0x52, 0xD5, 0xCA, 0xE8, 0x5A, 0x63, 0xFF, 0xD7, 0x4A, 0x40, 0xB7, 0x98, 0xBA, 0x4E, 0x15, 0x8C,
+ 0xB3, 0x00, 0x1C, 0x93, 0x3E, 0x1D, 0x69, 0x03, 0x26, 0x03, 0x75, 0x35, 0x46, 0x5A, 0x81, 0xC1,
+ 0xCC, 0x03, 0xC3, 0x2B, 0xFB, 0xF3, 0x1E, 0x16, 0xBF, 0xFB, 0x97, 0xAA, 0xAA, 0x81, 0xD4, 0x8B,
+ 0x33, 0x5D, 0x59, 0x59, 0xD5, 0x4B, 0xE0, 0xD2, 0x08, 0xA0, 0x5B, 0x8B, 0x3C, 0x3A, 0x8C, 0xFC,
+ 0x87, 0x52, 0xF6, 0x4D, 0xBB, 0x0F, 0x87, 0x01, 0x49, 0xD3, 0x73, 0xB8, 0x01, 0x43, 0xF7, 0x42,
+ 0x50, 0xB8, 0xB2, 0xC2, 0xFD, 0xE6, 0xE6, 0x66, 0x15, 0x29, 0xA1, 0x21, 0x14, 0xDB, 0x8A, 0x2B,
+ 0xF0, 0x49, 0xD3, 0xF1, 0x81, 0x30, 0x18, 0xD2, 0x1A, 0xC6, 0xF0, 0x25, 0xE3, 0x47, 0x5C, 0x71,
+ 0xF4, 0xF4, 0x22, 0xA6, 0xFC, 0x33, 0xDC, 0x95, 0x32, 0xCB, 0x1A, 0xAD, 0xA6, 0x68, 0xFA, 0x8F,
+ 0xD8, 0x3E, 0xCA, 0x0D, 0x76, 0xC1, 0x7A, 0xBA, 0x56, 0xA1, 0xFC, 0x9F, 0x61, 0xB9, 0x94, 0x28,
+ 0xD6, 0x70, 0x9C, 0x40, 0x80, 0x5A, 0xC3, 0x31, 0xC4, 0x1A, 0x41, 0x17, 0xFC, 0x26, 0x6B, 0xF9,
+ 0xCD, 0xFE, 0x19, 0x7E, 0x97, 0x76, 0x1E, 0x15, 0x25, 0x91, 0xAA, 0xAF, 0x50, 0x02, 0x9F, 0xDD,
+ 0xE9, 0xA6, 0x15, 0xB9, 0x55, 0x0A, 0x50, 0x1B, 0x46, 0x41, 0xD0, 0x8F, 0xE2, 0x83, 0x27, 0xD6,
+ 0x9D, 0xC5, 0x7A, 0x31, 0xC8, 0xD9, 0x5C, 0x6E, 0xB1, 0xBC, 0xB5, 0x44, 0x4F, 0xA1, 0xEC, 0x5F,
+ 0x4B, 0x15, 0x01, 0x3F, 0x23, 0x8B, 0x7B, 0xAC, 0xD4, 0xA5, 0x36, 0x28, 0x0F, 0x56, 0x3F, 0xD5,
+ 0x3C, 0xCB, 0x5F, 0xCC, 0xAE, 0x6B, 0x51, 0x9B, 0xC0, 0x38, 0x57, 0x92, 0x8B, 0x4A, 0xB2, 0xC8,
+ 0x13, 0x01, 0xA8, 0x58, 0xC7, 0x2E, 0xC4, 0x4D, 0x6B, 0x7A, 0x7C, 0xBF, 0x5C, 0x83, 0xC2, 0xDF,
+ 0xF5, 0xD5, 0x12, 0x33, 0x08, 0xC4, 0xD3, 0x95, 0x4B, 0x29, 0x5F, 0x37, 0x29, 0x8A, 0x0E, 0x62,
+ 0x47, 0xA3, 0x51, 0x4A, 0xC5, 0x47, 0x0C, 0x49, 0x56, 0xB2, 0x98, 0x9F, 0xC8, 0x90, 0x04, 0x8C,
+ 0x45, 0x3C, 0x8C, 0xB2, 0x94, 0x46, 0x99, 0xA8, 0xA4, 0x16, 0x63, 0x21, 0xCC, 0x5E, 0xFA, 0xE7,
+ 0x9F, 0x8B, 0xC9, 0x7E, 0x5A, 0x0B, 0x96, 0xD3, 0xEB, 0x3D, 0xBF, 0x34, 0xD9, 0xF7, 0x6B, 0x89,
+ 0xB9, 0x7A, 0xE9, 0xFF, 0x67, 0x4B, 0x21, 0x65, 0x4B, 0xF1, 0xB0, 0x54, 0x2E, 0x62, 0x62, 0x29,
+ 0xE6, 0xC9, 0x82, 0x91, 0x97, 0x7C, 0x16, 0x0D, 0x1A, 0x2B, 0x25, 0x55, 0x9E, 0x97, 0x7D, 0x95,
+ 0x43, 0x40, 0x59, 0x71, 0xE5, 0x35, 0x11, 0x06, 0x34, 0xE0, 0x63, 0x64, 0xF2, 0x41, 0xEB, 0xA7,
+ 0xD1, 0x94, 0x26, 0x87, 0x24, 0xA5, 0x06, 0x24, 0xCD, 0x65, 0xDC, 0x41, 0xA8, 0xE9, 0x04, 0xEB,
+ 0x76, 0x6D, 0x6E, 0x12, 0x05, 0xCE, 0x33, 0x77, 0xC4, 0xB1, 0x26, 0x03, 0xF9, 0xB2, 0xCA, 0x09,
+ 0xD4, 0xC6, 0xBE, 0x12, 0xA4, 0x3E, 0x52, 0x25, 0xA8, 0x61, 0x5A, 0xD0, 0x76, 0xC0, 0x35, 0x5F,
+ 0x26, 0x51, 0x4C, 0xC6, 0xB2, 0x07, 0x83, 0x35, 0x74, 0x0F, 0xA4, 0x66, 0x6D, 0x34, 0x91, 0x60,
+ 0xA9, 0x73, 0x29, 0xFC, 0x66, 0xD9, 0xC2, 0x70, 0x4B, 0x57, 0xC9, 0xB0, 0xBD, 0xF4, 0xA5, 0x35,
+ 0x59, 0x83, 0xE0, 0x0B, 0x6C, 0x62, 0xE0, 0x1E, 0x68, 0x64, 0xF2, 0x7B, 0x00, 0x77, 0x6B, 0xB6,
+ 0xA3, 0x3D, 0xD6, 0x8E, 0x6A, 0x35, 0x53, 0x55, 0xE9, 0xAE, 0x0B, 0x6D, 0x4E, 0x74, 0x23, 0x0B,
+ 0x4B, 0x10, 0xAA, 0x9A, 0x59, 0x0C, 0x38, 0x1B, 0x81, 0xAA, 0xBA, 0xC0, 0x11, 0xD6, 0x98, 0x66,
+ 0xA9, 0x23, 0xF1, 0x97, 0x1D, 0xC9, 0x13, 0xB5, 0x07, 0x95, 0xF5, 0x05, 0xD4, 0x31, 0xAB, 0x25,
+ 0x86, 0x30, 0xD3, 0x29, 0x13, 0xDE, 0x04, 0x03, 0x90, 0x07, 0x5A, 0xD5, 0x05, 0x14, 0xB5, 0x8E,
+ 0x1C, 0x4D, 0x44, 0xB8, 0x1C, 0x05, 0xF9, 0xF0, 0x6B, 0x9A, 0x0F, 0xBC, 0xB4, 0x18, 0xDD, 0x97,
+ 0x80, 0x50, 0xD2, 0xE6, 0xE0, 0x88, 0x8F, 0xF2, 0x21, 0xF4, 0xB2, 0x05, 0x9D, 0x02, 0x58, 0xFC,
+ 0xC6, 0x71, 0x3E, 0x8A, 0x27, 0xC5, 0x68, 0x42, 0xEF, 0x17, 0x78, 0x51, 0x01, 0xF5, 0xA9, 0xEE,
+ 0x28, 0x1B, 0xDB, 0x68, 0xCE, 0xF3, 0x41, 0x6B, 0x29, 0x7F, 0xF0, 0xFF, 0x28, 0x7F, 0xCC, 0xC7,
+ 0x85, 0x34, 0x71, 0x31, 0x1A, 0xB3, 0x42, 0x96, 0x61, 0x18, 0xFF, 0x90, 0x93, 0xA4, 0xD4, 0x13,
+ 0x97, 0x7A, 0x5A, 0xF1, 0xB3, 0xB6, 0x53, 0x98, 0x8E, 0x31, 0xAA, 0xF8, 0xE3, 0xC8, 0xF6, 0xF0,
+ 0xF7, 0x3C, 0xF2, 0x65, 0x6D, 0x69, 0x5A, 0xA1, 0x31, 0x82, 0x3A, 0x57, 0x37, 0xCB, 0x7E, 0x9A,
+ 0xFD, 0xB7, 0xAD, 0xE8, 0xD1, 0xF1, 0xE9, 0x71, 0xFF, 0xB8, 0x5C, 0x38, 0x23, 0xE7, 0x25, 0x93,
+ 0x8A, 0x2B, 0x5D, 0xFA, 0xB2, 0x22, 0x80, 0x02, 0x1B, 0x45, 0x01, 0x7B, 0xDD, 0xDC, 0x54, 0x7E,
+ 0xF1, 0xB6, 0x77, 0x71, 0x6E, 0xC7, 0x24, 0x01, 0x8F, 0x24, 0x15, 0xE6, 0xC2, 0x82, 0x44, 0xF9,
+ 0xE0, 0xD7, 0xC7, 0xA5, 0x72, 0x5D, 0x7E, 0x61, 0x70, 0xC4, 0xDC, 0x52, 0xA7, 0xA9, 0x7E, 0x78,
+ 0xE2, 0x62, 0x5D, 0x99, 0xBF, 0x04, 0x41, 0x72, 0x1A, 0x2D, 0x13, 0x55, 0x11, 0x67, 0x46, 0xE5,
+ 0x30, 0x2F, 0xEE, 0xB2, 0x75, 0x0D, 0xD3, 0xC8, 0xB4, 0xC4, 0x84, 0xA5, 0xE5, 0x46, 0xA5, 0x12,
+ 0x14, 0xFE, 0xA2, 0xB6, 0xE7, 0x8B, 0x91, 0x24, 0xB7, 0x5A, 0x73, 0xAB, 0x6F, 0x41, 0x2A, 0x3E,
+ 0x58, 0x04, 0x23, 0x66, 0x39, 0xDB, 0x16, 0x77, 0xA3, 0x43, 0xEE, 0x61, 0x5C, 0x7F, 0xBA, 0x35,
+ 0x78, 0xD2, 0x3C, 0x79, 0x61, 0x9E, 0xFC, 0xB1, 0x7B, 0x2E, 0x1C, 0x45, 0xF9, 0xDA, 0xE2, 0x98,
+ 0xF6, 0x10, 0x58, 0xBB, 0x6D, 0x2F, 0x7D, 0x18, 0x20, 0xD2, 0x83, 0xCB, 0x00, 0xF4, 0x63, 0x58,
+ 0xFF, 0x4A, 0xEE, 0x88, 0x7A, 0x09, 0xAA, 0xA2, 0xAD, 0x73, 0x54, 0xD8, 0xEE, 0xFD, 0x81, 0xA3,
+ 0xF2, 0xCE, 0x65, 0x18, 0x48, 0x97, 0xC3, 0x92, 0x37, 0x8B, 0x75, 0xC1, 0x61, 0x19, 0x31, 0x64,
+ 0x6C, 0x00, 0xE3, 0xCD, 0x5D, 0x49, 0x13, 0xD5, 0x1C, 0xB4, 0xF0, 0x1B, 0x08, 0x8A, 0x4F, 0x39,
+ 0xCE, 0x9A, 0x38, 0xAD, 0x62, 0x72, 0xC5, 0x23, 0xC8, 0x4A, 0x67, 0x89, 0xC0, 0x6E, 0x10, 0x0D,
+ 0x0D, 0x7C, 0x64, 0x9A, 0xA1, 0xB6, 0x1D, 0x3E, 0x37, 0xD7, 0xBC, 0xD9, 0x54, 0xFA, 0x4B, 0x62,
+ 0x79, 0xD5, 0xB0, 0x8B, 0x1C, 0x56, 0xCC, 0x75, 0x7D, 0x1F, 0xF4, 0xA3, 0x4E, 0x29, 0xAF, 0x48,
+ 0xA4, 0x53, 0xD1, 0x83, 0xC4, 0x86, 0xA2, 0x41, 0xBE, 0x91, 0x40, 0x44, 0x72, 0x4A, 0x33, 0x5D,
+ 0xC7, 0xCA, 0xD2, 0x0B, 0x28, 0x49, 0x7A, 0xB2, 0x73, 0x95, 0x49, 0x6B, 0x25, 0x06, 0xFE, 0xC8,
+ 0xD7, 0xF0, 0xC7, 0xA1, 0xD0, 0xA3, 0x83, 0x9B, 0x49, 0x2B, 0x83, 0xA4, 0x23, 0x64, 0x83, 0xA9,
+ 0x37, 0xE4, 0xBB, 0xA8, 0x2D, 0x2F, 0xCB, 0xB4, 0x16, 0x50, 0x70, 0x71, 0x83, 0xBB, 0x11, 0x30,
+ 0x52, 0x5A, 0xC4, 0x9E, 0x94, 0xA8, 0xC7, 0x8F, 0x10, 0x1F, 0x53, 0x4A, 0x20, 0x06, 0x20, 0xA6,
+ 0x40, 0xD0, 0xA7, 0x42, 0x8A, 0x54, 0xE6, 0x92, 0x53, 0x2A, 0x20, 0xCA, 0x48, 0xCD, 0xE2, 0xC1,
+ 0x85, 0x78, 0xD4, 0x46, 0xD6, 0x80, 0xFD, 0xDC, 0xBD, 0x73, 0x33, 0xDE, 0x90, 0x68, 0x09, 0x56,
+ 0x36, 0x3D, 0x9A, 0xA6, 0x52, 0x5C, 0x54, 0xC7, 0x19, 0xF8, 0xA8, 0xA1, 0x03, 0x5A, 0x23, 0x84,
+ 0x11, 0x1E, 0x84, 0x8A, 0x01, 0x40, 0x7F, 0x42, 0xC3, 0x1C, 0x22, 0x70, 0x08, 0x20, 0x82, 0xA0,
+ 0x7F, 0x49, 0x0D, 0xF7, 0x64, 0x05, 0xC9, 0xF8, 0xD8, 0x6D, 0x35, 0xF0, 0x9D, 0x66, 0x95, 0xEC,
+ 0x20, 0xA5, 0xBD, 0x68, 0x24, 0xFA, 0x64, 0x98, 0x1A, 0x50, 0x00, 0xAC, 0xD9, 0x01, 0xA0, 0x1E,
+ 0x24, 0x5E, 0x63, 0x2B, 0x3F, 0xEF, 0x04, 0x2A, 0xBB, 0x00, 0xAB, 0xBB, 0x8E, 0x87, 0x5F, 0x39,
+ 0x4F, 0x19, 0xA7, 0x39, 0x26, 0x00, 0x7B, 0x93, 0x68, 0x7A, 0x99, 0x30, 0x2E, 0xCE, 0x64, 0x1B,
+ 0x6A, 0x6C, 0xB4, 0xE4, 0xF5, 0xA9, 0x87, 0x15, 0x79, 0x3F, 0xC5, 0x8B, 0xCB, 0x0C, 0xF3, 0xBA,
+ 0x53, 0x79, 0x77, 0xB1, 0x86, 0x70, 0x21, 0x50, 0x66, 0x38, 0xB3, 0x29, 0x74, 0xB0, 0xFA, 0xA1,
+ 0x48, 0x82, 0x7A, 0x4F, 0xB7, 0x42, 0xE2, 0xC1, 0x44, 0xED, 0x81, 0xF9, 0xDC, 0xC2, 0xD8, 0xE1,
+ 0x94, 0x83, 0x5A, 0x0A, 0xB5, 0x02, 0x45, 0xC6, 0x95, 0xCD, 0x98, 0x35, 0x1D, 0x6A, 0x58, 0x88,
+ 0x61, 0xE0, 0xAF, 0xFE, 0x05, 0x0F, 0x1E, 0x1C, 0xC8, 0x55, 0x3F, 0xE1, 0x23, 0xE3, 0x7E, 0xF4,
+ 0x23, 0x3E, 0x3E, 0xAF, 0xF0, 0xF1, 0x79, 0x1D, 0x1F, 0xB4, 0xAA, 0x3C, 0x98, 0x0C, 0x80, 0xEC,
+ 0x19, 0xE1, 0x64, 0x4C, 0x13, 0x58, 0xC0, 0x43, 0x50, 0x25, 0x7F, 0x8B, 0xB3, 0x84, 0xFE, 0x98,
+ 0xB3, 0xDE, 0x84, 0x8D, 0xC4, 0x23, 0xFE, 0x8A, 0xD5, 0xFF, 0x82, 0x4B, 0x3C, 0x70, 0x3D, 0x97,
+ 0x79, 0x6D, 0x5A, 0x49, 0x28, 0x3F, 0x7E, 0x2B, 0x91, 0x7E, 0xE4, 0x42, 0x78, 0xA9, 0x38, 0xC8,
+ 0xDF, 0xB7, 0xF4, 0x00, 0xBC, 0x11, 0xF8, 0x29, 0x35, 0x75, 0xBC, 0x0B, 0xA5, 0xFC, 0x29, 0x30,
+ 0x64, 0xA8, 0xC0, 0x47, 0xDD, 0xD9, 0xDC, 0x12, 0xAE, 0x01, 0x8A, 0xF1, 0xA3, 0x29, 0xB0, 0xEA,
+ 0xC9, 0x02, 0xD7, 0x9E, 0x40, 0x26, 0x04, 0x91, 0xE0, 0x48, 0xC8, 0xA7, 0x8D, 0x2F, 0x07, 0x9B,
+ 0x37, 0x35, 0xC8, 0x43, 0x2E, 0xFC, 0x98, 0x2E, 0x0C, 0x36, 0x6F, 0xFE, 0x6D, 0x36, 0xC6, 0xCC,
+ 0x5A, 0x76, 0xA4, 0x96, 0x4C, 0xF6, 0xF4, 0x0B, 0xBF, 0x71, 0x09, 0x48, 0x5D, 0x49, 0x78, 0x45,
+ 0x34, 0x03, 0x6B, 0x43, 0x61, 0xE1, 0x07, 0xFF, 0x47, 0x09, 0xF8, 0x91, 0x9E, 0x07, 0xCE, 0xBD,
+ 0xE6, 0x3D, 0x5E, 0x2F, 0x3E, 0x85, 0xE9, 0x56, 0xE9, 0xC1, 0x4A, 0xC7, 0xEF, 0x53, 0x3A, 0x76,
+ 0x59, 0xA2, 0x14, 0x4A, 0x14, 0x59, 0x88, 0x1A, 0x6A, 0x50, 0x0E, 0x51, 0x98, 0x89, 0x17, 0xCD,
+ 0x81, 0x02, 0x9B, 0x73, 0x34, 0x5B, 0x3A, 0x02, 0x0F, 0xF4, 0xF5, 0x45, 0xEE, 0xFC, 0x74, 0x76,
+ 0x7A, 0x22, 0x44, 0x7C, 0xA5, 0x62, 0x22, 0xD0, 0xAA, 0x2E, 0x2C, 0x2F, 0xCF, 0x9C, 0x89, 0xE4,
+ 0xA1, 0x28, 0x75, 0x30, 0x31, 0x28, 0x87, 0xFE, 0x74, 0x31, 0xFC, 0x0A, 0x71, 0xD6, 0xD0, 0xCF,
+ 0x52, 0x48, 0x58, 0x5B, 0x36, 0xA2, 0xF7, 0xFB, 0x97, 0xF6, 0xAE, 0xDD, 0x84, 0xBA, 0x00, 0xB4,
+ 0x0A, 0x69, 0x19, 0xEE, 0x7D, 0xFE, 0xB7, 0x90, 0xB7, 0xFF, 0x1E, 0x32, 0x83, 0xA8, 0x95, 0x42,
+ 0x58, 0x2A, 0xF0, 0xAB, 0xB8, 0x93, 0x24, 0x9A, 0x4A, 0xB4, 0xE3, 0x24, 0xC1, 0x4B, 0xE9, 0x43,
+ 0x85, 0xA2, 0x0D, 0x61, 0x31, 0xA5, 0x89, 0xE6, 0x47, 0x34, 0xD5, 0x78, 0x24, 0xB4, 0x34, 0x8B,
+ 0x63, 0x68, 0x5C, 0x56, 0xF4, 0x61, 0xEB, 0xC5, 0xEB, 0xCB, 0xFB, 0x8C, 0x66, 0xD4, 0xCF, 0x97,
+ 0x69, 0x52, 0xD1, 0x0B, 0x56, 0x50, 0xDF, 0x10, 0xEE, 0x7E, 0xB9, 0xC9, 0xEB, 0xA9, 0x8C, 0x73,
+ 0x8C, 0xA2, 0x1B, 0x2D, 0x35, 0x07, 0xE9, 0x26, 0x40, 0xD5, 0xE5, 0x59, 0x10, 0xCC, 0xDB, 0x2B,
+ 0xB4, 0xA0, 0xF1, 0x8A, 0x44, 0x24, 0x9F, 0xCB, 0x67, 0x7F, 0xE4, 0xC9, 0xA9, 0xE2, 0x82, 0x50,
+ 0xF2, 0x54, 0xA9, 0x36, 0xAD, 0x0D, 0x63, 0x83, 0x6A, 0x8C, 0xA7, 0x82, 0x70, 0x0F, 0xAF, 0x51,
+ 0xE9, 0xC2, 0x2C, 0x6A, 0x29, 0xDC, 0xDE, 0x46, 0x5F, 0xCB, 0x6D, 0xE9, 0x89, 0x7C, 0x2A, 0x25,
+ 0xE3, 0xAE, 0xAE, 0x63, 0x55, 0x45, 0xB1, 0x3E, 0x25, 0x61, 0x5A, 0x26, 0x5B, 0x54, 0x06, 0x26,
+ 0x77, 0x0B, 0x70, 0x9B, 0x06, 0x29, 0x1C, 0xBD, 0x7E, 0x7F, 0xCE, 0x46, 0xD1, 0xCE, 0x11, 0x80,
+ 0x69, 0xC5, 0x3E, 0x93, 0xD7, 0xE0, 0x24, 0xCC, 0x73, 0x07, 0x32, 0xE9, 0x4A, 0x03, 0x0E, 0xA9,
+ 0x98, 0x44, 0xFE, 0x81, 0x7E, 0xA0, 0x3B, 0x3A, 0xFC, 0xBB, 0x09, 0x35, 0x47, 0xCD, 0xA5, 0xD0,
+ 0xA4, 0xFA, 0x74, 0x70, 0xF5, 0x06, 0xC2, 0x53, 0x0C, 0xA5, 0x01, 0x17, 0x50, 0x34, 0xD7, 0x74,
+ 0x7C, 0x7A, 0x7D, 0x0C, 0x29, 0xC8, 0x7F, 0x21, 0x37, 0x66, 0xBB, 0xAA, 0x6C, 0xB8, 0xF3, 0xEA,
+ 0x75, 0x56, 0x2E, 0x03, 0x7A, 0x61, 0x8C, 0x58, 0x0F, 0x29, 0x7E, 0xFB, 0x7B, 0xF4, 0x9E, 0x8D,
+ 0x15, 0xD2, 0x6A, 0x5D, 0x6F, 0xCE, 0x76, 0x90, 0x67, 0x89, 0xD5, 0x43, 0x2C, 0x70, 0x97, 0x1F,
+ 0x29, 0x59, 0x95, 0x35, 0xDC, 0xF6, 0x48, 0x10, 0xE0, 0xC7, 0x5A, 0x03, 0x1B, 0x6A, 0x22, 0xB2,
+ 0xD4, 0x42, 0x22, 0x29, 0x08, 0x90, 0xD2, 0x3E, 0x84, 0x39, 0xD3, 0x92, 0x65, 0x86, 0xB2, 0xA1,
+ 0xBC, 0xFF, 0xC5, 0x9A, 0xA3, 0x64, 0x46, 0xE8, 0xCE, 0xF9, 0x6C, 0x73, 0x53, 0xD8, 0x85, 0x99,
+ 0x18, 0x05, 0x52, 0x8A, 0x01, 0x1C, 0x9A, 0x7D, 0x68, 0x2D, 0x8C, 0xB2, 0x90, 0x58, 0xAB, 0x3D,
+ 0xD2, 0xB6, 0x51, 0x55, 0x03, 0x54, 0x7C, 0x46, 0x01, 0x03, 0xCE, 0xB2, 0x24, 0x80, 0xA8, 0x8B,
+ 0x39, 0xBA, 0xB2, 0x2D, 0xC5, 0xBA, 0xD0, 0x84, 0x0E, 0xEC, 0x67, 0xC8, 0x12, 0x95, 0x97, 0xAD,
+ 0xA2, 0x27, 0x12, 0xC5, 0x77, 0x95, 0x9E, 0xC8, 0x6F, 0xE5, 0x84, 0xAA, 0xC8, 0x77, 0x88, 0x2F,
+ 0x13, 0x5C, 0xD4, 0xD1, 0x13, 0xA0, 0x24, 0x83, 0x52, 0x34, 0x60, 0x2A, 0x2C, 0x37, 0xEE, 0xEB,
+ 0xD3, 0xE9, 0xB4, 0x8E, 0xDF, 0x6A, 0xEB, 0x70, 0x82, 0xB2, 0x02, 0x5F, 0x5F, 0xC7, 0x21, 0x47,
+ 0x15, 0x58, 0xF8, 0x6E, 0xE1, 0xAC, 0xBA, 0xE8, 0x42, 0x7F, 0x2B, 0xDE, 0xD4, 0xAA, 0xD2, 0x59,
+ 0xE1, 0x73, 0x79, 0xDB, 0x7B, 0x3B, 0x2B, 0x20, 0x32, 0xC4, 0xAF, 0xB2, 0x90, 0x69, 0x20, 0x0D,
+ 0x3B, 0xE5, 0x46, 0x56, 0x25, 0x85, 0x65, 0x5C, 0xB0, 0xE3, 0x2C, 0x9D, 0x18, 0x33, 0x60, 0xDD,
+ 0x11, 0x96, 0xD2, 0x95, 0x43, 0x2D, 0x65, 0xB7, 0x0E, 0xB7, 0x0A, 0xFB, 0x70, 0x30, 0x83, 0x94,
+ 0x79, 0xFB, 0xF3, 0x4F, 0x39, 0x5B, 0xDE, 0xF6, 0x92, 0x62, 0x71, 0xE1, 0xF3, 0xFC, 0xA9, 0x35,
+ 0xAF, 0x69, 0xA5, 0xD1, 0xAF, 0xC4, 0x97, 0xBD, 0x46, 0xFE, 0x19, 0x3B, 0xFF, 0x9C, 0xAD, 0x81,
+ 0xB1, 0x43, 0x23, 0x2A, 0xDC, 0x4C, 0x8C, 0xEA, 0x2F, 0x34, 0xE6, 0x63, 0x79, 0x29, 0xBF, 0x2D,
+ 0xA0, 0x54, 0xA9, 0xD3, 0x68, 0x78, 0x3E, 0xFF, 0x9A, 0x42, 0x19, 0x1D, 0x65, 0xFE, 0x28, 0x20,
+ 0x09, 0xC5, 0x82, 0xA3, 0x41, 0xBE, 0x92, 0xFB, 0x46, 0xC0, 0x86, 0x69, 0x03, 0x93, 0x6D, 0xCB,
+ 0xDE, 0xB2, 0x77, 0x71, 0x64, 0x7F, 0x4D, 0xF7, 0x57, 0x4F, 0xD8, 0x5F, 0x34, 0x69, 0x58, 0x0B,
+ 0xE7, 0xB5, 0xAB, 0x8A, 0x4D, 0x6A, 0x83, 0xFB, 0xC4, 0xA7, 0x70, 0x3D, 0x6F, 0xB3, 0xCC, 0xB6,
+ 0x1A, 0xE4, 0x5F, 0x60, 0xD4, 0x31, 0xBA, 0x95, 0x2F, 0x92, 0xF4, 0x81, 0x7B, 0x18, 0x5B, 0x17,
+ 0x54, 0x26, 0x70, 0x49, 0xD5, 0x87, 0x34, 0xB9, 0xD3, 0x9C, 0x2F, 0x39, 0xC3, 0xB7, 0x3C, 0xA8,
+ 0x03, 0xE4, 0x37, 0x9C, 0x72, 0x39, 0xB0, 0xBF, 0x07, 0x5D, 0x33, 0x2A, 0x41, 0x79, 0xB1, 0x26,
+ 0x9B, 0xE6, 0x7C, 0x02, 0x82, 0x01, 0x70, 0xB1, 0xA3, 0x48, 0xCD, 0x2B, 0xCB, 0x98, 0x9B, 0x57,
+ 0x96, 0x54, 0xE2, 0x5F, 0x59, 0xCC, 0xDB, 0x9F, 0xFC, 0xDB, 0x4C, 0xF9, 0x7F, 0x5B, 0x28, 0x36,
+ 0x32, 0xF9, 0xE1, 0x09, 0xF7, 0x56, 0x3F, 0x45, 0xAD, 0x47, 0x51, 0xBB, 0xF7, 0xFF, 0x17, 0x53,
+ 0xE8, 0x9D, 0x36, 0x92, 0x29, 0x00, 0x00
+};
+
+#define SPIFFS_MAXLENGTH_FILEPATH 32
+const char *excludeListFile = "/.exclude.files";
+
+typedef struct ExcludeListS {
+ char *item;
+ ExcludeListS *next;
+} ExcludeList;
+
+static ExcludeList *excludes = NULL;
+
+static bool matchWild(const char *pattern, const char *testee) {
+ const char *nxPat = NULL, *nxTst = NULL;
+
+ while (*testee) {
+ if (( *pattern == '?' ) || (*pattern == *testee)){
+ pattern++;testee++;
+ continue;
+ }
+ if (*pattern=='*'){
+ nxPat=pattern++; nxTst=testee;
+ continue;
+ }
+ if (nxPat){
+ pattern = nxPat+1; testee=++nxTst;
+ continue;
+ }
+ return false;
+ }
+ while (*pattern=='*'){pattern++;}
+ return (*pattern == 0);
+}
+
+static bool addExclude(const char *item){
+ size_t len = strlen(item);
+ if(!len){
+ return false;
+ }
+ ExcludeList *e = (ExcludeList *)malloc(sizeof(ExcludeList));
+ if(!e){
+ return false;
+ }
+ e->item = (char *)malloc(len+1);
+ if(!e->item){
+ free(e);
+ return false;
+ }
+ memcpy(e->item, item, len+1);
+ e->next = excludes;
+ excludes = e;
+ return true;
+}
+
+static void loadExcludeList(fs::FS &_fs, const char *filename){
+ static char linebuf[SPIFFS_MAXLENGTH_FILEPATH];
+ fs::File excludeFile=_fs.open(filename, "r");
+ if(!excludeFile){
+ //addExclude("/*.js.gz");
+ return;
+ }
+#ifdef ESP32
+ if(excludeFile.isDirectory()){
+ excludeFile.close();
+ return;
+ }
+#endif
+ if (excludeFile.size() > 0){
+ uint8_t idx;
+ bool isOverflowed = false;
+ while (excludeFile.available()){
+ linebuf[0] = '\0';
+ idx = 0;
+ int lastChar;
+ do {
+ lastChar = excludeFile.read();
+ if(lastChar != '\r'){
+ linebuf[idx++] = (char) lastChar;
+ }
+ } while ((lastChar >= 0) && (lastChar != '\n') && (idx < SPIFFS_MAXLENGTH_FILEPATH));
+
+ if(isOverflowed){
+ isOverflowed = (lastChar != '\n');
+ continue;
+ }
+ isOverflowed = (idx >= SPIFFS_MAXLENGTH_FILEPATH);
+ linebuf[idx-1] = '\0';
+ if(!addExclude(linebuf)){
+ excludeFile.close();
+ return;
+ }
+ }
+ }
+ excludeFile.close();
+}
+
+static bool isExcluded(fs::FS &_fs, const char *filename) {
+ if(excludes == NULL){
+ loadExcludeList(_fs, excludeListFile);
+ }
+ ExcludeList *e = excludes;
+ while(e){
+ if (matchWild(e->item, filename)){
+ return true;
+ }
+ e = e->next;
+ }
+ return false;
+}
+
+// WEB HANDLER IMPLEMENTATION
+
+#ifdef ESP32
+SPIFFSEditor::SPIFFSEditor(const fs::FS& fs, const String& username, const String& password)
+#else
+SPIFFSEditor::SPIFFSEditor(const String& username, const String& password, const fs::FS& fs)
+#endif
+:_fs(fs)
+,_username(username)
+,_password(password)
+,_authenticated(false)
+,_startTime(0)
+{}
+
+bool SPIFFSEditor::canHandle(AsyncWebServerRequest *request){
+ if(request->url().equalsIgnoreCase("/edit")){
+ if(request->method() == HTTP_GET){
+ if(request->hasParam("list"))
+ return true;
+ if(request->hasParam("edit")){
+ request->_tempFile = _fs.open(request->arg("edit"), "r");
+ if(!request->_tempFile){
+ return false;
+ }
+#ifdef ESP32
+ if(request->_tempFile.isDirectory()){
+ request->_tempFile.close();
+ return false;
+ }
+#endif
+ }
+ if(request->hasParam("download")){
+ request->_tempFile = _fs.open(request->arg("download"), "r");
+ if(!request->_tempFile){
+ return false;
+ }
+#ifdef ESP32
+ if(request->_tempFile.isDirectory()){
+ request->_tempFile.close();
+ return false;
+ }
+#endif
+ }
+ request->addInterestingHeader("If-Modified-Since");
+ return true;
+ }
+ else if(request->method() == HTTP_POST)
+ return true;
+ else if(request->method() == HTTP_DELETE)
+ return true;
+ else if(request->method() == HTTP_PUT)
+ return true;
+
+ }
+ return false;
+}
+
+
+void SPIFFSEditor::handleRequest(AsyncWebServerRequest *request){
+ if(_username.length() && _password.length() && !request->authenticate(_username.c_str(), _password.c_str()))
+ return request->requestAuthentication();
+
+ if(request->method() == HTTP_GET){
+ if(request->hasParam("list")){
+ String path = request->getParam("list")->value();
+#ifdef ESP32
+ File dir = _fs.open(path);
+#else
+ Dir dir = _fs.openDir(path);
+#endif
+ path = String();
+ String output = "[";
+#ifdef ESP32
+ File entry = dir.openNextFile();
+ while(entry){
+#else
+ while(dir.next()){
+ fs::File entry = dir.openFile("r");
+#endif
+ if (isExcluded(_fs, entry.name())) {
+#ifdef ESP32
+ entry = dir.openNextFile();
+#endif
+ continue;
+ }
+ if (output != "[") output += ',';
+ output += "{\"type\":\"";
+ output += "file";
+ output += "\",\"name\":\"";
+ output += String(entry.name());
+ output += "\",\"size\":";
+ output += String(entry.size());
+ output += "}";
+#ifdef ESP32
+ entry = dir.openNextFile();
+#else
+ entry.close();
+#endif
+ }
+#ifdef ESP32
+ dir.close();
+#endif
+ output += "]";
+ request->send(200, "application/json", output);
+ output = String();
+ }
+ else if(request->hasParam("edit") || request->hasParam("download")){
+ request->send(request->_tempFile, request->_tempFile.name(), String(), request->hasParam("download"));
+ }
+ else {
+ const char * buildTime = __DATE__ " " __TIME__ " GMT";
+ if (request->header("If-Modified-Since").equals(buildTime)) {
+ request->send(304);
+ } else {
+ AsyncWebServerResponse *response = request->beginResponse_P(200, "text/html", edit_htm_gz, edit_htm_gz_len);
+ response->addHeader("Content-Encoding", "gzip");
+ response->addHeader("Last-Modified", buildTime);
+ request->send(response);
+ }
+ }
+ } else if(request->method() == HTTP_DELETE){
+ if(request->hasParam("path", true)){
+ _fs.remove(request->getParam("path", true)->value());
+ request->send(200, "", "DELETE: "+request->getParam("path", true)->value());
+ } else
+ request->send(404);
+ } else if(request->method() == HTTP_POST){
+ if(request->hasParam("data", true, true) && _fs.exists(request->getParam("data", true, true)->value()))
+ request->send(200, "", "UPLOADED: "+request->getParam("data", true, true)->value());
+ else
+ request->send(500);
+ } else if(request->method() == HTTP_PUT){
+ if(request->hasParam("path", true)){
+ String filename = request->getParam("path", true)->value();
+ if(_fs.exists(filename)){
+ request->send(200);
+ } else {
+ fs::File f = _fs.open(filename, "w");
+ if(f){
+ f.write((uint8_t)0x00);
+ f.close();
+ request->send(200, "", "CREATE: "+filename);
+ } else {
+ request->send(500);
+ }
+ }
+ } else
+ request->send(400);
+ }
+}
+
+void SPIFFSEditor::handleUpload(AsyncWebServerRequest *request, const String& filename, size_t index, uint8_t *data, size_t len, bool final){
+ if(!index){
+ if(!_username.length() || request->authenticate(_username.c_str(),_password.c_str())){
+ _authenticated = true;
+ request->_tempFile = _fs.open(filename, "w");
+ _startTime = millis();
+ }
+ }
+ if(_authenticated && request->_tempFile){
+ if(len){
+ request->_tempFile.write(data,len);
+ }
+ if(final){
+ request->_tempFile.close();
+ }
+ }
+}
diff --git a/lib/libesp32/ESPAsyncWebServer/src/SPIFFSEditor.h b/lib/libesp32/ESPAsyncWebServer/src/SPIFFSEditor.h
new file mode 100644
index 000000000..3586429e1
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/src/SPIFFSEditor.h
@@ -0,0 +1,24 @@
+#ifndef SPIFFSEditor_H_
+#define SPIFFSEditor_H_
+#include
+
+class SPIFFSEditor: public AsyncWebHandler {
+ private:
+ fs::FS _fs;
+ String _username;
+ String _password;
+ bool _authenticated;
+ uint32_t _startTime;
+ public:
+#ifdef ESP32
+ SPIFFSEditor(const fs::FS& fs, const String& username=String(), const String& password=String());
+#else
+ SPIFFSEditor(const String& username=String(), const String& password=String(), const fs::FS& fs=SPIFFS);
+#endif
+ virtual bool canHandle(AsyncWebServerRequest *request) override final;
+ virtual void handleRequest(AsyncWebServerRequest *request) override final;
+ virtual void handleUpload(AsyncWebServerRequest *request, const String& filename, size_t index, uint8_t *data, size_t len, bool final) override final;
+ virtual bool isRequestHandlerTrivial() override final {return false;}
+};
+
+#endif
diff --git a/lib/libesp32/ESPAsyncWebServer/src/StringArray.h b/lib/libesp32/ESPAsyncWebServer/src/StringArray.h
new file mode 100644
index 000000000..801643967
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/src/StringArray.h
@@ -0,0 +1,193 @@
+/*
+ Asynchronous WebServer library for Espressif MCUs
+
+ Copyright (c) 2016 Hristo Gochkov. All rights reserved.
+ This file is part of the esp8266 core for Arduino environment.
+
+ This library is free software; you can redistribute it and/or
+ modify it under the terms of the GNU Lesser General Public
+ License as published by the Free Software Foundation; either
+ version 2.1 of the License, or (at your option) any later version.
+
+ This library is distributed in the hope that it will be useful,
+ but WITHOUT ANY WARRANTY; without even the implied warranty of
+ MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
+ Lesser General Public License for more details.
+
+ You should have received a copy of the GNU Lesser General Public
+ License along with this library; if not, write to the Free Software
+ Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
+*/
+#ifndef STRINGARRAY_H_
+#define STRINGARRAY_H_
+
+#include "stddef.h"
+#include "WString.h"
+
+template
+class AsyncLinkedListNode {
+ T _value;
+ public:
+ AsyncLinkedListNode* next;
+ AsyncLinkedListNode(const T val): _value(val), next(nullptr) {}
+ ~AsyncLinkedListNode(){}
+ const T& value() const { return _value; };
+ T& value(){ return _value; }
+};
+
+template class Item = AsyncLinkedListNode>
+class AsyncLinkedList {
+ public:
+ typedef Item ItemType;
+ typedef std::function OnRemove;
+ typedef std::function Predicate;
+ private:
+ ItemType* _root;
+ OnRemove _onRemove;
+
+ class Iterator {
+ ItemType* _node;
+ public:
+ Iterator(ItemType* current = nullptr) : _node(current) {}
+ Iterator(const Iterator& i) : _node(i._node) {}
+ Iterator& operator ++() { _node = _node->next; return *this; }
+ bool operator != (const Iterator& i) const { return _node != i._node; }
+ const T& operator * () const { return _node->value(); }
+ const T* operator -> () const { return &_node->value(); }
+ };
+
+ public:
+ typedef const Iterator ConstIterator;
+ ConstIterator begin() const { return ConstIterator(_root); }
+ ConstIterator end() const { return ConstIterator(nullptr); }
+
+ AsyncLinkedList(OnRemove onRemove) : _root(nullptr), _onRemove(onRemove) {}
+ ~AsyncLinkedList(){}
+ void add(const T& t){
+ auto it = new ItemType(t);
+ if(!_root){
+ _root = it;
+ } else {
+ auto i = _root;
+ while(i->next) i = i->next;
+ i->next = it;
+ }
+ }
+ T& front() const {
+ return _root->value();
+ }
+
+ bool isEmpty() const {
+ return _root == nullptr;
+ }
+ size_t length() const {
+ size_t i = 0;
+ auto it = _root;
+ while(it){
+ i++;
+ it = it->next;
+ }
+ return i;
+ }
+ size_t count_if(Predicate predicate) const {
+ size_t i = 0;
+ auto it = _root;
+ while(it){
+ if (!predicate){
+ i++;
+ }
+ else if (predicate(it->value())) {
+ i++;
+ }
+ it = it->next;
+ }
+ return i;
+ }
+ const T* nth(size_t N) const {
+ size_t i = 0;
+ auto it = _root;
+ while(it){
+ if(i++ == N)
+ return &(it->value());
+ it = it->next;
+ }
+ return nullptr;
+ }
+ bool remove(const T& t){
+ auto it = _root;
+ auto pit = _root;
+ while(it){
+ if(it->value() == t){
+ if(it == _root){
+ _root = _root->next;
+ } else {
+ pit->next = it->next;
+ }
+
+ if (_onRemove) {
+ _onRemove(it->value());
+ }
+
+ delete it;
+ return true;
+ }
+ pit = it;
+ it = it->next;
+ }
+ return false;
+ }
+ bool remove_first(Predicate predicate){
+ auto it = _root;
+ auto pit = _root;
+ while(it){
+ if(predicate(it->value())){
+ if(it == _root){
+ _root = _root->next;
+ } else {
+ pit->next = it->next;
+ }
+ if (_onRemove) {
+ _onRemove(it->value());
+ }
+ delete it;
+ return true;
+ }
+ pit = it;
+ it = it->next;
+ }
+ return false;
+ }
+
+ void free(){
+ while(_root != nullptr){
+ auto it = _root;
+ _root = _root->next;
+ if (_onRemove) {
+ _onRemove(it->value());
+ }
+ delete it;
+ }
+ _root = nullptr;
+ }
+};
+
+
+class StringArray : public AsyncLinkedList {
+public:
+
+ StringArray() : AsyncLinkedList(nullptr) {}
+
+ bool containsIgnoreCase(const String& str){
+ for (const auto& s : *this) {
+ if (str.equalsIgnoreCase(s)) {
+ return true;
+ }
+ }
+ return false;
+ }
+};
+
+
+
+
+#endif /* STRINGARRAY_H_ */
diff --git a/lib/libesp32/ESPAsyncWebServer/src/WebAuthentication.cpp b/lib/libesp32/ESPAsyncWebServer/src/WebAuthentication.cpp
new file mode 100644
index 000000000..45246a196
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/src/WebAuthentication.cpp
@@ -0,0 +1,235 @@
+/*
+ Asynchronous WebServer library for Espressif MCUs
+
+ Copyright (c) 2016 Hristo Gochkov. All rights reserved.
+ This file is part of the esp8266 core for Arduino environment.
+
+ This library is free software; you can redistribute it and/or
+ modify it under the terms of the GNU Lesser General Public
+ License as published by the Free Software Foundation; either
+ version 2.1 of the License, or (at your option) any later version.
+
+ This library is distributed in the hope that it will be useful,
+ but WITHOUT ANY WARRANTY; without even the implied warranty of
+ MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
+ Lesser General Public License for more details.
+
+ You should have received a copy of the GNU Lesser General Public
+ License along with this library; if not, write to the Free Software
+ Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
+*/
+#include "WebAuthentication.h"
+#include
+#ifdef ESP32
+#include "mbedtls/md5.h"
+#else
+#include "md5.h"
+#endif
+
+
+// Basic Auth hash = base64("username:password")
+
+bool checkBasicAuthentication(const char * hash, const char * username, const char * password){
+ if(username == NULL || password == NULL || hash == NULL)
+ return false;
+
+ size_t toencodeLen = strlen(username)+strlen(password)+1;
+ size_t encodedLen = base64_encode_expected_len(toencodeLen);
+ if(strlen(hash) != encodedLen)
+ return false;
+
+ char *toencode = new char[toencodeLen+1];
+ if(toencode == NULL){
+ return false;
+ }
+ char *encoded = new char[base64_encode_expected_len(toencodeLen)+1];
+ if(encoded == NULL){
+ delete[] toencode;
+ return false;
+ }
+ sprintf(toencode, "%s:%s", username, password);
+ if(base64_encode_chars(toencode, toencodeLen, encoded) > 0 && memcmp(hash, encoded, encodedLen) == 0){
+ delete[] toencode;
+ delete[] encoded;
+ return true;
+ }
+ delete[] toencode;
+ delete[] encoded;
+ return false;
+}
+
+static bool getMD5(uint8_t * data, uint16_t len, char * output){//33 bytes or more
+#ifdef ESP32
+ mbedtls_md5_context _ctx;
+#else
+ md5_context_t _ctx;
+#endif
+ uint8_t i;
+ uint8_t * _buf = (uint8_t*)malloc(16);
+ if(_buf == NULL)
+ return false;
+ memset(_buf, 0x00, 16);
+#ifdef ESP32
+ mbedtls_md5_init(&_ctx);
+ mbedtls_md5_starts_ret(&_ctx);
+ mbedtls_md5_update_ret(&_ctx, data, len);
+ mbedtls_md5_finish_ret(&_ctx, _buf);
+#else
+ MD5Init(&_ctx);
+ MD5Update(&_ctx, data, len);
+ MD5Final(_buf, &_ctx);
+#endif
+ for(i = 0; i < 16; i++) {
+ sprintf(output + (i * 2), "%02x", _buf[i]);
+ }
+ free(_buf);
+ return true;
+}
+
+static String genRandomMD5(){
+#ifdef ESP8266
+ uint32_t r = RANDOM_REG32;
+#else
+ uint32_t r = rand();
+#endif
+ char * out = (char*)malloc(33);
+ if(out == NULL || !getMD5((uint8_t*)(&r), 4, out))
+ return "";
+ String res = String(out);
+ free(out);
+ return res;
+}
+
+static String stringMD5(const String& in){
+ char * out = (char*)malloc(33);
+ if(out == NULL || !getMD5((uint8_t*)(in.c_str()), in.length(), out))
+ return "";
+ String res = String(out);
+ free(out);
+ return res;
+}
+
+String generateDigestHash(const char * username, const char * password, const char * realm){
+ if(username == NULL || password == NULL || realm == NULL){
+ return "";
+ }
+ char * out = (char*)malloc(33);
+ String res = String(username);
+ res.concat(":");
+ res.concat(realm);
+ res.concat(":");
+ String in = res;
+ in.concat(password);
+ if(out == NULL || !getMD5((uint8_t*)(in.c_str()), in.length(), out))
+ return "";
+ res.concat(out);
+ free(out);
+ return res;
+}
+
+String requestDigestAuthentication(const char * realm){
+ String header = "realm=\"";
+ if(realm == NULL)
+ header.concat("asyncesp");
+ else
+ header.concat(realm);
+ header.concat( "\", qop=\"auth\", nonce=\"");
+ header.concat(genRandomMD5());
+ header.concat("\", opaque=\"");
+ header.concat(genRandomMD5());
+ header.concat("\"");
+ return header;
+}
+
+bool checkDigestAuthentication(const char * header, const char * method, const char * username, const char * password, const char * realm, bool passwordIsHash, const char * nonce, const char * opaque, const char * uri){
+ if(username == NULL || password == NULL || header == NULL || method == NULL){
+ //os_printf("AUTH FAIL: missing requred fields\n");
+ return false;
+ }
+
+ String myHeader = String(header);
+ int nextBreak = myHeader.indexOf(",");
+ if(nextBreak < 0){
+ //os_printf("AUTH FAIL: no variables\n");
+ return false;
+ }
+
+ String myUsername = String();
+ String myRealm = String();
+ String myNonce = String();
+ String myUri = String();
+ String myResponse = String();
+ String myQop = String();
+ String myNc = String();
+ String myCnonce = String();
+
+ myHeader += ", ";
+ do {
+ String avLine = myHeader.substring(0, nextBreak);
+ avLine.trim();
+ myHeader = myHeader.substring(nextBreak+1);
+ nextBreak = myHeader.indexOf(",");
+
+ int eqSign = avLine.indexOf("=");
+ if(eqSign < 0){
+ //os_printf("AUTH FAIL: no = sign\n");
+ return false;
+ }
+ String varName = avLine.substring(0, eqSign);
+ avLine = avLine.substring(eqSign + 1);
+ if(avLine.startsWith("\"")){
+ avLine = avLine.substring(1, avLine.length() - 1);
+ }
+
+ if(varName.equals("username")){
+ if(!avLine.equals(username)){
+ //os_printf("AUTH FAIL: username\n");
+ return false;
+ }
+ myUsername = avLine;
+ } else if(varName.equals("realm")){
+ if(realm != NULL && !avLine.equals(realm)){
+ //os_printf("AUTH FAIL: realm\n");
+ return false;
+ }
+ myRealm = avLine;
+ } else if(varName.equals("nonce")){
+ if(nonce != NULL && !avLine.equals(nonce)){
+ //os_printf("AUTH FAIL: nonce\n");
+ return false;
+ }
+ myNonce = avLine;
+ } else if(varName.equals("opaque")){
+ if(opaque != NULL && !avLine.equals(opaque)){
+ //os_printf("AUTH FAIL: opaque\n");
+ return false;
+ }
+ } else if(varName.equals("uri")){
+ if(uri != NULL && !avLine.equals(uri)){
+ //os_printf("AUTH FAIL: uri\n");
+ return false;
+ }
+ myUri = avLine;
+ } else if(varName.equals("response")){
+ myResponse = avLine;
+ } else if(varName.equals("qop")){
+ myQop = avLine;
+ } else if(varName.equals("nc")){
+ myNc = avLine;
+ } else if(varName.equals("cnonce")){
+ myCnonce = avLine;
+ }
+ } while(nextBreak > 0);
+
+ String ha1 = (passwordIsHash) ? String(password) : stringMD5(myUsername + ":" + myRealm + ":" + String(password));
+ String ha2 = String(method) + ":" + myUri;
+ String response = ha1 + ":" + myNonce + ":" + myNc + ":" + myCnonce + ":" + myQop + ":" + stringMD5(ha2);
+
+ if(myResponse.equals(stringMD5(response))){
+ //os_printf("AUTH SUCCESS\n");
+ return true;
+ }
+
+ //os_printf("AUTH FAIL: password\n");
+ return false;
+}
diff --git a/lib/libesp32/ESPAsyncWebServer/src/WebAuthentication.h b/lib/libesp32/ESPAsyncWebServer/src/WebAuthentication.h
new file mode 100644
index 000000000..ff68265d9
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/src/WebAuthentication.h
@@ -0,0 +1,34 @@
+/*
+ Asynchronous WebServer library for Espressif MCUs
+
+ Copyright (c) 2016 Hristo Gochkov. All rights reserved.
+ This file is part of the esp8266 core for Arduino environment.
+
+ This library is free software; you can redistribute it and/or
+ modify it under the terms of the GNU Lesser General Public
+ License as published by the Free Software Foundation; either
+ version 2.1 of the License, or (at your option) any later version.
+
+ This library is distributed in the hope that it will be useful,
+ but WITHOUT ANY WARRANTY; without even the implied warranty of
+ MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
+ Lesser General Public License for more details.
+
+ You should have received a copy of the GNU Lesser General Public
+ License along with this library; if not, write to the Free Software
+ Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
+*/
+
+#ifndef WEB_AUTHENTICATION_H_
+#define WEB_AUTHENTICATION_H_
+
+#include "Arduino.h"
+
+bool checkBasicAuthentication(const char * header, const char * username, const char * password);
+String requestDigestAuthentication(const char * realm);
+bool checkDigestAuthentication(const char * header, const char * method, const char * username, const char * password, const char * realm, bool passwordIsHash, const char * nonce, const char * opaque, const char * uri);
+
+//for storing hashed versions on the device that can be authenticated against
+String generateDigestHash(const char * username, const char * password, const char * realm);
+
+#endif
diff --git a/lib/libesp32/ESPAsyncWebServer/src/WebHandlerImpl.h b/lib/libesp32/ESPAsyncWebServer/src/WebHandlerImpl.h
new file mode 100644
index 000000000..9b7ba1b04
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/src/WebHandlerImpl.h
@@ -0,0 +1,151 @@
+/*
+ Asynchronous WebServer library for Espressif MCUs
+
+ Copyright (c) 2016 Hristo Gochkov. All rights reserved.
+ This file is part of the esp8266 core for Arduino environment.
+
+ This library is free software; you can redistribute it and/or
+ modify it under the terms of the GNU Lesser General Public
+ License as published by the Free Software Foundation; either
+ version 2.1 of the License, or (at your option) any later version.
+
+ This library is distributed in the hope that it will be useful,
+ but WITHOUT ANY WARRANTY; without even the implied warranty of
+ MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
+ Lesser General Public License for more details.
+
+ You should have received a copy of the GNU Lesser General Public
+ License along with this library; if not, write to the Free Software
+ Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
+*/
+#ifndef ASYNCWEBSERVERHANDLERIMPL_H_
+#define ASYNCWEBSERVERHANDLERIMPL_H_
+
+#include
+#ifdef ASYNCWEBSERVER_REGEX
+#include
+#endif
+
+#include "stddef.h"
+#include
+
+class AsyncStaticWebHandler: public AsyncWebHandler {
+ using File = fs::File;
+ using FS = fs::FS;
+ private:
+ bool _getFile(AsyncWebServerRequest *request);
+ bool _fileExists(AsyncWebServerRequest *request, const String& path);
+ uint8_t _countBits(const uint8_t value) const;
+ protected:
+ FS _fs;
+ String _uri;
+ String _path;
+ String _default_file;
+ String _cache_control;
+ String _last_modified;
+ AwsTemplateProcessor _callback;
+ bool _isDir;
+ bool _gzipFirst;
+ uint8_t _gzipStats;
+ public:
+ AsyncStaticWebHandler(const char* uri, FS& fs, const char* path, const char* cache_control);
+ virtual bool canHandle(AsyncWebServerRequest *request) override final;
+ virtual void handleRequest(AsyncWebServerRequest *request) override final;
+ AsyncStaticWebHandler& setIsDir(bool isDir);
+ AsyncStaticWebHandler& setDefaultFile(const char* filename);
+ AsyncStaticWebHandler& setCacheControl(const char* cache_control);
+ AsyncStaticWebHandler& setLastModified(const char* last_modified);
+ AsyncStaticWebHandler& setLastModified(struct tm* last_modified);
+ #ifdef ESP8266
+ AsyncStaticWebHandler& setLastModified(time_t last_modified);
+ AsyncStaticWebHandler& setLastModified(); //sets to current time. Make sure sntp is runing and time is updated
+ #endif
+ AsyncStaticWebHandler& setTemplateProcessor(AwsTemplateProcessor newCallback) {_callback = newCallback; return *this;}
+};
+
+class AsyncCallbackWebHandler: public AsyncWebHandler {
+ private:
+ protected:
+ String _uri;
+ WebRequestMethodComposite _method;
+ ArRequestHandlerFunction _onRequest;
+ ArUploadHandlerFunction _onUpload;
+ ArBodyHandlerFunction _onBody;
+ bool _isRegex;
+ public:
+ AsyncCallbackWebHandler() : _uri(), _method(HTTP_ANY), _onRequest(NULL), _onUpload(NULL), _onBody(NULL), _isRegex(false) {}
+ void setUri(const String& uri){
+ _uri = uri;
+ _isRegex = uri.startsWith("^") && uri.endsWith("$");
+ }
+ void setMethod(WebRequestMethodComposite method){ _method = method; }
+ void onRequest(ArRequestHandlerFunction fn){ _onRequest = fn; }
+ void onUpload(ArUploadHandlerFunction fn){ _onUpload = fn; }
+ void onBody(ArBodyHandlerFunction fn){ _onBody = fn; }
+
+ virtual bool canHandle(AsyncWebServerRequest *request) override final{
+
+ if(!_onRequest)
+ return false;
+
+ if(!(_method & request->method()))
+ return false;
+
+#ifdef ASYNCWEBSERVER_REGEX
+ if (_isRegex) {
+ std::regex pattern(_uri.c_str());
+ std::smatch matches;
+ std::string s(request->url().c_str());
+ if(std::regex_search(s, matches, pattern)) {
+ for (size_t i = 1; i < matches.size(); ++i) { // start from 1
+ request->_addPathParam(matches[i].str().c_str());
+ }
+ } else {
+ return false;
+ }
+ } else
+#endif
+ if (_uri.length() && _uri.startsWith("/*.")) {
+ String uriTemplate = String (_uri);
+ uriTemplate = uriTemplate.substring(uriTemplate.lastIndexOf("."));
+ if (!request->url().endsWith(uriTemplate))
+ return false;
+ }
+ else
+ if (_uri.length() && _uri.endsWith("*")) {
+ String uriTemplate = String(_uri);
+ uriTemplate = uriTemplate.substring(0, uriTemplate.length() - 1);
+ if (!request->url().startsWith(uriTemplate))
+ return false;
+ }
+ else if(_uri.length() && (_uri != request->url() && !request->url().startsWith(_uri+"/")))
+ return false;
+
+ request->addInterestingHeader("ANY");
+ return true;
+ }
+
+ virtual void handleRequest(AsyncWebServerRequest *request) override final {
+ if((_username != "" && _password != "") && !request->authenticate(_username.c_str(), _password.c_str()))
+ return request->requestAuthentication();
+ if(_onRequest)
+ _onRequest(request);
+ else
+ request->send(500);
+ }
+ virtual void handleUpload(AsyncWebServerRequest *request, const String& filename, size_t index, uint8_t *data, size_t len, bool final) override final {
+ if((_username != "" && _password != "") && !request->authenticate(_username.c_str(), _password.c_str()))
+ return request->requestAuthentication();
+ if(_onUpload)
+ _onUpload(request, filename, index, data, len, final);
+ }
+ virtual void handleBody(AsyncWebServerRequest *request, uint8_t *data, size_t len, size_t index, size_t total) override final {
+ if((_username != "" && _password != "") && !request->authenticate(_username.c_str(), _password.c_str()))
+ return request->requestAuthentication();
+ if(_onBody)
+ _onBody(request, data, len, index, total);
+ }
+ virtual bool isRequestHandlerTrivial() override final {return _onRequest ? false : true;}
+};
+
+#endif /* ASYNCWEBSERVERHANDLERIMPL_H_ */
diff --git a/lib/libesp32/ESPAsyncWebServer/src/WebHandlers.cpp b/lib/libesp32/ESPAsyncWebServer/src/WebHandlers.cpp
new file mode 100644
index 000000000..1f435e68a
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/src/WebHandlers.cpp
@@ -0,0 +1,220 @@
+/*
+ Asynchronous WebServer library for Espressif MCUs
+
+ Copyright (c) 2016 Hristo Gochkov. All rights reserved.
+ This file is part of the esp8266 core for Arduino environment.
+
+ This library is free software; you can redistribute it and/or
+ modify it under the terms of the GNU Lesser General Public
+ License as published by the Free Software Foundation; either
+ version 2.1 of the License, or (at your option) any later version.
+
+ This library is distributed in the hope that it will be useful,
+ but WITHOUT ANY WARRANTY; without even the implied warranty of
+ MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
+ Lesser General Public License for more details.
+
+ You should have received a copy of the GNU Lesser General Public
+ License along with this library; if not, write to the Free Software
+ Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
+*/
+#include "ESPAsyncWebServer.h"
+#include "WebHandlerImpl.h"
+
+AsyncStaticWebHandler::AsyncStaticWebHandler(const char* uri, FS& fs, const char* path, const char* cache_control)
+ : _fs(fs), _uri(uri), _path(path), _default_file("index.htm"), _cache_control(cache_control), _last_modified(""), _callback(nullptr)
+{
+ // Ensure leading '/'
+ if (_uri.length() == 0 || _uri[0] != '/') _uri = "/" + _uri;
+ if (_path.length() == 0 || _path[0] != '/') _path = "/" + _path;
+
+ // If path ends with '/' we assume a hint that this is a directory to improve performance.
+ // However - if it does not end with '/' we, can't assume a file, path can still be a directory.
+ _isDir = _path[_path.length()-1] == '/';
+
+ // Remove the trailing '/' so we can handle default file
+ // Notice that root will be "" not "/"
+ if (_uri[_uri.length()-1] == '/') _uri = _uri.substring(0, _uri.length()-1);
+ if (_path[_path.length()-1] == '/') _path = _path.substring(0, _path.length()-1);
+
+ // Reset stats
+ _gzipFirst = false;
+ _gzipStats = 0xF8;
+}
+
+AsyncStaticWebHandler& AsyncStaticWebHandler::setIsDir(bool isDir){
+ _isDir = isDir;
+ return *this;
+}
+
+AsyncStaticWebHandler& AsyncStaticWebHandler::setDefaultFile(const char* filename){
+ _default_file = String(filename);
+ return *this;
+}
+
+AsyncStaticWebHandler& AsyncStaticWebHandler::setCacheControl(const char* cache_control){
+ _cache_control = String(cache_control);
+ return *this;
+}
+
+AsyncStaticWebHandler& AsyncStaticWebHandler::setLastModified(const char* last_modified){
+ _last_modified = String(last_modified);
+ return *this;
+}
+
+AsyncStaticWebHandler& AsyncStaticWebHandler::setLastModified(struct tm* last_modified){
+ char result[30];
+ strftime (result,30,"%a, %d %b %Y %H:%M:%S %Z", last_modified);
+ return setLastModified((const char *)result);
+}
+
+#ifdef ESP8266
+AsyncStaticWebHandler& AsyncStaticWebHandler::setLastModified(time_t last_modified){
+ return setLastModified((struct tm *)gmtime(&last_modified));
+}
+
+AsyncStaticWebHandler& AsyncStaticWebHandler::setLastModified(){
+ time_t last_modified;
+ if(time(&last_modified) == 0) //time is not yet set
+ return *this;
+ return setLastModified(last_modified);
+}
+#endif
+bool AsyncStaticWebHandler::canHandle(AsyncWebServerRequest *request){
+ if(request->method() != HTTP_GET
+ || !request->url().startsWith(_uri)
+ || !request->isExpectedRequestedConnType(RCT_DEFAULT, RCT_HTTP)
+ ){
+ return false;
+ }
+ if (_getFile(request)) {
+ // We interested in "If-Modified-Since" header to check if file was modified
+ if (_last_modified.length())
+ request->addInterestingHeader("If-Modified-Since");
+
+ if(_cache_control.length())
+ request->addInterestingHeader("If-None-Match");
+
+ DEBUGF("[AsyncStaticWebHandler::canHandle] TRUE\n");
+ return true;
+ }
+
+ return false;
+}
+
+bool AsyncStaticWebHandler::_getFile(AsyncWebServerRequest *request)
+{
+ // Remove the found uri
+ String path = request->url().substring(_uri.length());
+
+ // We can skip the file check and look for default if request is to the root of a directory or that request path ends with '/'
+ bool canSkipFileCheck = (_isDir && path.length() == 0) || (path.length() && path[path.length()-1] == '/');
+
+ path = _path + path;
+
+ // Do we have a file or .gz file
+ if (!canSkipFileCheck && _fileExists(request, path))
+ return true;
+
+ // Can't handle if not default file
+ if (_default_file.length() == 0)
+ return false;
+
+ // Try to add default file, ensure there is a trailing '/' ot the path.
+ if (path.length() == 0 || path[path.length()-1] != '/')
+ path += "/";
+ path += _default_file;
+
+ return _fileExists(request, path);
+}
+
+#ifdef ESP32
+#define FILE_IS_REAL(f) (f == true && !f.isDirectory())
+#else
+#define FILE_IS_REAL(f) (f == true)
+#endif
+
+bool AsyncStaticWebHandler::_fileExists(AsyncWebServerRequest *request, const String& path)
+{
+ bool fileFound = false;
+ bool gzipFound = false;
+
+ String gzip = path + ".gz";
+
+ if (_gzipFirst) {
+ request->_tempFile = _fs.open(gzip, "r");
+ gzipFound = FILE_IS_REAL(request->_tempFile);
+ if (!gzipFound){
+ request->_tempFile = _fs.open(path, "r");
+ fileFound = FILE_IS_REAL(request->_tempFile);
+ }
+ } else {
+ request->_tempFile = _fs.open(path, "r");
+ fileFound = FILE_IS_REAL(request->_tempFile);
+ if (!fileFound){
+ request->_tempFile = _fs.open(gzip, "r");
+ gzipFound = FILE_IS_REAL(request->_tempFile);
+ }
+ }
+
+ bool found = fileFound || gzipFound;
+
+ if (found) {
+ // Extract the file name from the path and keep it in _tempObject
+ size_t pathLen = path.length();
+ char * _tempPath = (char*)malloc(pathLen+1);
+ snprintf(_tempPath, pathLen+1, "%s", path.c_str());
+ request->_tempObject = (void*)_tempPath;
+
+ // Calculate gzip statistic
+ _gzipStats = (_gzipStats << 1) + (gzipFound ? 1 : 0);
+ if (_gzipStats == 0x00) _gzipFirst = false; // All files are not gzip
+ else if (_gzipStats == 0xFF) _gzipFirst = true; // All files are gzip
+ else _gzipFirst = _countBits(_gzipStats) > 4; // IF we have more gzip files - try gzip first
+ }
+
+ return found;
+}
+
+uint8_t AsyncStaticWebHandler::_countBits(const uint8_t value) const
+{
+ uint8_t w = value;
+ uint8_t n;
+ for (n=0; w!=0; n++) w&=w-1;
+ return n;
+}
+
+void AsyncStaticWebHandler::handleRequest(AsyncWebServerRequest *request)
+{
+ // Get the filename from request->_tempObject and free it
+ String filename = String((char*)request->_tempObject);
+ free(request->_tempObject);
+ request->_tempObject = NULL;
+ if((_username != "" && _password != "") && !request->authenticate(_username.c_str(), _password.c_str()))
+ return request->requestAuthentication();
+
+ if (request->_tempFile == true) {
+ String etag = String(request->_tempFile.size());
+ if (_last_modified.length() && _last_modified == request->header("If-Modified-Since")) {
+ request->_tempFile.close();
+ request->send(304); // Not modified
+ } else if (_cache_control.length() && request->hasHeader("If-None-Match") && request->header("If-None-Match").equals(etag)) {
+ request->_tempFile.close();
+ AsyncWebServerResponse * response = new AsyncBasicResponse(304); // Not modified
+ response->addHeader("Cache-Control", _cache_control);
+ response->addHeader("ETag", etag);
+ request->send(response);
+ } else {
+ AsyncWebServerResponse * response = new AsyncFileResponse(request->_tempFile, filename, String(), false, _callback);
+ if (_last_modified.length())
+ response->addHeader("Last-Modified", _last_modified);
+ if (_cache_control.length()){
+ response->addHeader("Cache-Control", _cache_control);
+ response->addHeader("ETag", etag);
+ }
+ request->send(response);
+ }
+ } else {
+ request->send(404);
+ }
+}
diff --git a/lib/libesp32/ESPAsyncWebServer/src/WebRequest.cpp b/lib/libesp32/ESPAsyncWebServer/src/WebRequest.cpp
new file mode 100644
index 000000000..20b0b1fe4
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/src/WebRequest.cpp
@@ -0,0 +1,1008 @@
+/*
+ Asynchronous WebServer library for Espressif MCUs
+
+ Copyright (c) 2016 Hristo Gochkov. All rights reserved.
+ This file is part of the esp8266 core for Arduino environment.
+
+ This library is free software; you can redistribute it and/or
+ modify it under the terms of the GNU Lesser General Public
+ License as published by the Free Software Foundation; either
+ version 2.1 of the License, or (at your option) any later version.
+
+ This library is distributed in the hope that it will be useful,
+ but WITHOUT ANY WARRANTY; without even the implied warranty of
+ MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
+ Lesser General Public License for more details.
+
+ You should have received a copy of the GNU Lesser General Public
+ License along with this library; if not, write to the Free Software
+ Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
+*/
+#include "ESPAsyncWebServer.h"
+#include "WebResponseImpl.h"
+#include "WebAuthentication.h"
+
+#ifndef ESP8266
+#define os_strlen strlen
+#endif
+
+static const String SharedEmptyString = String();
+
+#define __is_param_char(c) ((c) && ((c) != '{') && ((c) != '[') && ((c) != '&') && ((c) != '='))
+
+enum { PARSE_REQ_START, PARSE_REQ_HEADERS, PARSE_REQ_BODY, PARSE_REQ_END, PARSE_REQ_FAIL };
+
+AsyncWebServerRequest::AsyncWebServerRequest(AsyncWebServer* s, AsyncClient* c)
+ : _client(c)
+ , _server(s)
+ , _handler(NULL)
+ , _response(NULL)
+ , _temp()
+ , _parseState(0)
+ , _version(0)
+ , _method(HTTP_ANY)
+ , _url()
+ , _host()
+ , _contentType()
+ , _boundary()
+ , _authorization()
+ , _reqconntype(RCT_HTTP)
+ , _isDigest(false)
+ , _isMultipart(false)
+ , _isPlainPost(false)
+ , _expectingContinue(false)
+ , _contentLength(0)
+ , _parsedLength(0)
+ , _headers(AsyncLinkedList([](AsyncWebHeader *h){ delete h; }))
+ , _params(AsyncLinkedList([](AsyncWebParameter *p){ delete p; }))
+ , _pathParams(AsyncLinkedList([](String *p){ delete p; }))
+ , _multiParseState(0)
+ , _boundaryPosition(0)
+ , _itemStartIndex(0)
+ , _itemSize(0)
+ , _itemName()
+ , _itemFilename()
+ , _itemType()
+ , _itemValue()
+ , _itemBuffer(0)
+ , _itemBufferIndex(0)
+ , _itemIsFile(false)
+ , _tempObject(NULL)
+{
+ c->onError([](void *r, AsyncClient* c, int8_t error){ (void)c; AsyncWebServerRequest *req = (AsyncWebServerRequest*)r; req->_onError(error); }, this);
+ c->onAck([](void *r, AsyncClient* c, size_t len, uint32_t time){ (void)c; AsyncWebServerRequest *req = (AsyncWebServerRequest*)r; req->_onAck(len, time); }, this);
+ c->onDisconnect([](void *r, AsyncClient* c){ AsyncWebServerRequest *req = (AsyncWebServerRequest*)r; req->_onDisconnect(); delete c; }, this);
+ c->onTimeout([](void *r, AsyncClient* c, uint32_t time){ (void)c; AsyncWebServerRequest *req = (AsyncWebServerRequest*)r; req->_onTimeout(time); }, this);
+ c->onData([](void *r, AsyncClient* c, void *buf, size_t len){ (void)c; AsyncWebServerRequest *req = (AsyncWebServerRequest*)r; req->_onData(buf, len); }, this);
+ c->onPoll([](void *r, AsyncClient* c){ (void)c; AsyncWebServerRequest *req = ( AsyncWebServerRequest*)r; req->_onPoll(); }, this);
+}
+
+AsyncWebServerRequest::~AsyncWebServerRequest(){
+ _headers.free();
+
+ _params.free();
+ _pathParams.free();
+
+ _interestingHeaders.free();
+
+ if(_response != NULL){
+ delete _response;
+ }
+
+ if(_tempObject != NULL){
+ free(_tempObject);
+ }
+
+ if(_tempFile){
+ _tempFile.close();
+ }
+}
+
+void AsyncWebServerRequest::_onData(void *buf, size_t len){
+ size_t i = 0;
+ while (true) {
+
+ if(_parseState < PARSE_REQ_BODY){
+ // Find new line in buf
+ char *str = (char*)buf;
+ for (i = 0; i < len; i++) {
+ if (str[i] == '\n') {
+ break;
+ }
+ }
+ if (i == len) { // No new line, just add the buffer in _temp
+ char ch = str[len-1];
+ str[len-1] = 0;
+ _temp.reserve(_temp.length()+len);
+ _temp.concat(str);
+ _temp.concat(ch);
+ } else { // Found new line - extract it and parse
+ str[i] = 0; // Terminate the string at the end of the line.
+ _temp.concat(str);
+ _temp.trim();
+ _parseLine();
+ if (++i < len) {
+ // Still have more buffer to process
+ buf = str+i;
+ len-= i;
+ continue;
+ }
+ }
+ } else if(_parseState == PARSE_REQ_BODY){
+ // A handler should be already attached at this point in _parseLine function.
+ // If handler does nothing (_onRequest is NULL), we don't need to really parse the body.
+ const bool needParse = _handler && !_handler->isRequestHandlerTrivial();
+ if(_isMultipart){
+ if(needParse){
+ size_t i;
+ for(i=0; i end) equal = end;
+ String name = params.substring(start, equal);
+ String value = equal + 1 < end ? params.substring(equal + 1, end) : String();
+ _addParam(new AsyncWebParameter(urlDecode(name), urlDecode(value)));
+ start = end + 1;
+ }
+}
+
+bool AsyncWebServerRequest::_parseReqHead(){
+ // Split the head into method, url and version
+ int index = _temp.indexOf(' ');
+ String m = _temp.substring(0, index);
+ index = _temp.indexOf(' ', index+1);
+ String u = _temp.substring(m.length()+1, index);
+ _temp = _temp.substring(index+1);
+
+ if(m == "GET"){
+ _method = HTTP_GET;
+ } else if(m == "POST"){
+ _method = HTTP_POST;
+ } else if(m == "DELETE"){
+ _method = HTTP_DELETE;
+ } else if(m == "PUT"){
+ _method = HTTP_PUT;
+ } else if(m == "PATCH"){
+ _method = HTTP_PATCH;
+ } else if(m == "HEAD"){
+ _method = HTTP_HEAD;
+ } else if(m == "OPTIONS"){
+ _method = HTTP_OPTIONS;
+ }
+
+ String g = String();
+ index = u.indexOf('?');
+ if(index > 0){
+ g = u.substring(index +1);
+ u = u.substring(0, index);
+ }
+ _url = urlDecode(u);
+ _addGetParams(g);
+
+ if(!_temp.startsWith("HTTP/1.0"))
+ _version = 1;
+
+ _temp = String();
+ return true;
+}
+
+bool strContains(String src, String find, bool mindcase = true) {
+ int pos=0, i=0;
+ const int slen = src.length();
+ const int flen = find.length();
+
+ if (slen < flen) return false;
+ while (pos <= (slen - flen)) {
+ for (i=0; i < flen; i++) {
+ if (mindcase) {
+ if (src[pos+i] != find[i]) i = flen + 1; // no match
+ } else if (tolower(src[pos+i]) != tolower(find[i])) i = flen + 1; // no match
+ }
+ if (i == flen) return true;
+ pos++;
+ }
+ return false;
+}
+
+bool AsyncWebServerRequest::_parseReqHeader(){
+ int index = _temp.indexOf(':');
+ if(index){
+ String name = _temp.substring(0, index);
+ String value = _temp.substring(index + 2);
+ if(name.equalsIgnoreCase("Host")){
+ _host = value;
+ } else if(name.equalsIgnoreCase("Content-Type")){
+ _contentType = value.substring(0, value.indexOf(';'));
+ if (value.startsWith("multipart/")){
+ _boundary = value.substring(value.indexOf('=')+1);
+ _boundary.replace("\"","");
+ _isMultipart = true;
+ }
+ } else if(name.equalsIgnoreCase("Content-Length")){
+ _contentLength = atoi(value.c_str());
+ } else if(name.equalsIgnoreCase("Expect") && value == "100-continue"){
+ _expectingContinue = true;
+ } else if(name.equalsIgnoreCase("Authorization")){
+ if(value.length() > 5 && value.substring(0,5).equalsIgnoreCase("Basic")){
+ _authorization = value.substring(6);
+ } else if(value.length() > 6 && value.substring(0,6).equalsIgnoreCase("Digest")){
+ _isDigest = true;
+ _authorization = value.substring(7);
+ }
+ } else {
+ if(name.equalsIgnoreCase("Upgrade") && value.equalsIgnoreCase("websocket")){
+ // WebSocket request can be uniquely identified by header: [Upgrade: websocket]
+ _reqconntype = RCT_WS;
+ } else {
+ if(name.equalsIgnoreCase("Accept") && strContains(value, "text/event-stream", false)){
+ // WebEvent request can be uniquely identified by header: [Accept: text/event-stream]
+ _reqconntype = RCT_EVENT;
+ }
+ }
+ }
+ _headers.add(new AsyncWebHeader(name, value));
+ }
+ _temp = String();
+ return true;
+}
+
+void AsyncWebServerRequest::_parsePlainPostChar(uint8_t data){
+ if(data && (char)data != '&')
+ _temp += (char)data;
+ if(!data || (char)data == '&' || _parsedLength == _contentLength){
+ String name = "body";
+ String value = _temp;
+ if(!_temp.startsWith("{") && !_temp.startsWith("[") && _temp.indexOf('=') > 0){
+ name = _temp.substring(0, _temp.indexOf('='));
+ value = _temp.substring(_temp.indexOf('=') + 1);
+ }
+ _addParam(new AsyncWebParameter(urlDecode(name), urlDecode(value), true));
+ _temp = String();
+ }
+}
+
+void AsyncWebServerRequest::_handleUploadByte(uint8_t data, bool last){
+ _itemBuffer[_itemBufferIndex++] = data;
+
+ if(last || _itemBufferIndex == 1460){
+ //check if authenticated before calling the upload
+ if(_handler)
+ _handler->handleUpload(this, _itemFilename, _itemSize - _itemBufferIndex, _itemBuffer, _itemBufferIndex, false);
+ _itemBufferIndex = 0;
+ }
+}
+
+enum {
+ EXPECT_BOUNDARY,
+ PARSE_HEADERS,
+ WAIT_FOR_RETURN1,
+ EXPECT_FEED1,
+ EXPECT_DASH1,
+ EXPECT_DASH2,
+ BOUNDARY_OR_DATA,
+ DASH3_OR_RETURN2,
+ EXPECT_FEED2,
+ PARSING_FINISHED,
+ PARSE_ERROR
+};
+
+void AsyncWebServerRequest::_parseMultipartPostByte(uint8_t data, bool last){
+#define itemWriteByte(b) do { _itemSize++; if(_itemIsFile) _handleUploadByte(b, last); else _itemValue+=(char)(b); } while(0)
+
+ if(!_parsedLength){
+ _multiParseState = EXPECT_BOUNDARY;
+ _temp = String();
+ _itemName = String();
+ _itemFilename = String();
+ _itemType = String();
+ }
+
+ if(_multiParseState == WAIT_FOR_RETURN1){
+ if(data != '\r'){
+ itemWriteByte(data);
+ } else {
+ _multiParseState = EXPECT_FEED1;
+ }
+ } else if(_multiParseState == EXPECT_BOUNDARY){
+ if(_parsedLength < 2 && data != '-'){
+ _multiParseState = PARSE_ERROR;
+ return;
+ } else if(_parsedLength - 2 < _boundary.length() && _boundary.c_str()[_parsedLength - 2] != data){
+ _multiParseState = PARSE_ERROR;
+ return;
+ } else if(_parsedLength - 2 == _boundary.length() && data != '\r'){
+ _multiParseState = PARSE_ERROR;
+ return;
+ } else if(_parsedLength - 3 == _boundary.length()){
+ if(data != '\n'){
+ _multiParseState = PARSE_ERROR;
+ return;
+ }
+ _multiParseState = PARSE_HEADERS;
+ _itemIsFile = false;
+ }
+ } else if(_multiParseState == PARSE_HEADERS){
+ if((char)data != '\r' && (char)data != '\n')
+ _temp += (char)data;
+ if((char)data == '\n'){
+ if(_temp.length()){
+ if(_temp.length() > 12 && _temp.substring(0, 12).equalsIgnoreCase("Content-Type")){
+ _itemType = _temp.substring(14);
+ _itemIsFile = true;
+ } else if(_temp.length() > 19 && _temp.substring(0, 19).equalsIgnoreCase("Content-Disposition")){
+ _temp = _temp.substring(_temp.indexOf(';') + 2);
+ while(_temp.indexOf(';') > 0){
+ String name = _temp.substring(0, _temp.indexOf('='));
+ String nameVal = _temp.substring(_temp.indexOf('=') + 2, _temp.indexOf(';') - 1);
+ if(name == "name"){
+ _itemName = nameVal;
+ } else if(name == "filename"){
+ _itemFilename = nameVal;
+ _itemIsFile = true;
+ }
+ _temp = _temp.substring(_temp.indexOf(';') + 2);
+ }
+ String name = _temp.substring(0, _temp.indexOf('='));
+ String nameVal = _temp.substring(_temp.indexOf('=') + 2, _temp.length() - 1);
+ if(name == "name"){
+ _itemName = nameVal;
+ } else if(name == "filename"){
+ _itemFilename = nameVal;
+ _itemIsFile = true;
+ }
+ }
+ _temp = String();
+ } else {
+ _multiParseState = WAIT_FOR_RETURN1;
+ //value starts from here
+ _itemSize = 0;
+ _itemStartIndex = _parsedLength;
+ _itemValue = String();
+ if(_itemIsFile){
+ if(_itemBuffer)
+ free(_itemBuffer);
+ _itemBuffer = (uint8_t*)malloc(1460);
+ if(_itemBuffer == NULL){
+ _multiParseState = PARSE_ERROR;
+ return;
+ }
+ _itemBufferIndex = 0;
+ }
+ }
+ }
+ } else if(_multiParseState == EXPECT_FEED1){
+ if(data != '\n'){
+ _multiParseState = WAIT_FOR_RETURN1;
+ itemWriteByte('\r'); _parseMultipartPostByte(data, last);
+ } else {
+ _multiParseState = EXPECT_DASH1;
+ }
+ } else if(_multiParseState == EXPECT_DASH1){
+ if(data != '-'){
+ _multiParseState = WAIT_FOR_RETURN1;
+ itemWriteByte('\r'); itemWriteByte('\n'); _parseMultipartPostByte(data, last);
+ } else {
+ _multiParseState = EXPECT_DASH2;
+ }
+ } else if(_multiParseState == EXPECT_DASH2){
+ if(data != '-'){
+ _multiParseState = WAIT_FOR_RETURN1;
+ itemWriteByte('\r'); itemWriteByte('\n'); itemWriteByte('-'); _parseMultipartPostByte(data, last);
+ } else {
+ _multiParseState = BOUNDARY_OR_DATA;
+ _boundaryPosition = 0;
+ }
+ } else if(_multiParseState == BOUNDARY_OR_DATA){
+ if(_boundaryPosition < _boundary.length() && _boundary.c_str()[_boundaryPosition] != data){
+ _multiParseState = WAIT_FOR_RETURN1;
+ itemWriteByte('\r'); itemWriteByte('\n'); itemWriteByte('-'); itemWriteByte('-');
+ uint8_t i;
+ for(i=0; i<_boundaryPosition; i++)
+ itemWriteByte(_boundary.c_str()[i]);
+ _parseMultipartPostByte(data, last);
+ } else if(_boundaryPosition == _boundary.length() - 1){
+ _multiParseState = DASH3_OR_RETURN2;
+ if(!_itemIsFile){
+ _addParam(new AsyncWebParameter(_itemName, _itemValue, true));
+ } else {
+ if(_itemSize){
+ //check if authenticated before calling the upload
+ if(_handler) _handler->handleUpload(this, _itemFilename, _itemSize - _itemBufferIndex, _itemBuffer, _itemBufferIndex, true);
+ _itemBufferIndex = 0;
+ _addParam(new AsyncWebParameter(_itemName, _itemFilename, true, true, _itemSize));
+ }
+ free(_itemBuffer);
+ _itemBuffer = NULL;
+ }
+
+ } else {
+ _boundaryPosition++;
+ }
+ } else if(_multiParseState == DASH3_OR_RETURN2){
+ if(data == '-' && (_contentLength - _parsedLength - 4) != 0){
+ //os_printf("ERROR: The parser got to the end of the POST but is expecting %u bytes more!\nDrop an issue so we can have more info on the matter!\n", _contentLength - _parsedLength - 4);
+ _contentLength = _parsedLength + 4;//lets close the request gracefully
+ }
+ if(data == '\r'){
+ _multiParseState = EXPECT_FEED2;
+ } else if(data == '-' && _contentLength == (_parsedLength + 4)){
+ _multiParseState = PARSING_FINISHED;
+ } else {
+ _multiParseState = WAIT_FOR_RETURN1;
+ itemWriteByte('\r'); itemWriteByte('\n'); itemWriteByte('-'); itemWriteByte('-');
+ uint8_t i; for(i=0; i<_boundary.length(); i++) itemWriteByte(_boundary.c_str()[i]);
+ _parseMultipartPostByte(data, last);
+ }
+ } else if(_multiParseState == EXPECT_FEED2){
+ if(data == '\n'){
+ _multiParseState = PARSE_HEADERS;
+ _itemIsFile = false;
+ } else {
+ _multiParseState = WAIT_FOR_RETURN1;
+ itemWriteByte('\r'); itemWriteByte('\n'); itemWriteByte('-'); itemWriteByte('-');
+ uint8_t i; for(i=0; i<_boundary.length(); i++) itemWriteByte(_boundary.c_str()[i]);
+ itemWriteByte('\r'); _parseMultipartPostByte(data, last);
+ }
+ }
+}
+
+void AsyncWebServerRequest::_parseLine(){
+ if(_parseState == PARSE_REQ_START){
+ if(!_temp.length()){
+ _parseState = PARSE_REQ_FAIL;
+ _client->close();
+ } else {
+ _parseReqHead();
+ _parseState = PARSE_REQ_HEADERS;
+ }
+ return;
+ }
+
+ if(_parseState == PARSE_REQ_HEADERS){
+ if(!_temp.length()){
+ //end of headers
+ _server->_rewriteRequest(this);
+ _server->_attachHandler(this);
+ _removeNotInterestingHeaders();
+ if(_expectingContinue){
+ const char * response = "HTTP/1.1 100 Continue\r\n\r\n";
+ _client->write(response, os_strlen(response));
+ }
+ //check handler for authentication
+ if(_contentLength){
+ _parseState = PARSE_REQ_BODY;
+ } else {
+ _parseState = PARSE_REQ_END;
+ if(_handler) _handler->handleRequest(this);
+ else send(501);
+ }
+ } else _parseReqHeader();
+ }
+}
+
+size_t AsyncWebServerRequest::headers() const{
+ return _headers.length();
+}
+
+bool AsyncWebServerRequest::hasHeader(const String& name) const {
+ for(const auto& h: _headers){
+ if(h->name().equalsIgnoreCase(name)){
+ return true;
+ }
+ }
+ return false;
+}
+
+bool AsyncWebServerRequest::hasHeader(const __FlashStringHelper * data) const {
+ PGM_P p = reinterpret_cast(data);
+ size_t n = 0;
+ while (1) {
+ if (pgm_read_byte(p+n) == 0) break;
+ n += 1;
+ }
+ char * name = (char*) malloc(n+1);
+ name[n] = 0;
+ if (name) {
+ for(size_t b=0; bname().equalsIgnoreCase(name)){
+ return h;
+ }
+ }
+ return nullptr;
+}
+
+AsyncWebHeader* AsyncWebServerRequest::getHeader(const __FlashStringHelper * data) const {
+ PGM_P p = reinterpret_cast(data);
+ size_t n = strlen_P(p);
+ char * name = (char*) malloc(n+1);
+ if (name) {
+ strcpy_P(name, p);
+ AsyncWebHeader* result = getHeader( String(name));
+ free(name);
+ return result;
+ } else {
+ return nullptr;
+ }
+}
+
+AsyncWebHeader* AsyncWebServerRequest::getHeader(size_t num) const {
+ auto header = _headers.nth(num);
+ return header ? *header : nullptr;
+}
+
+size_t AsyncWebServerRequest::params() const {
+ return _params.length();
+}
+
+bool AsyncWebServerRequest::hasParam(const String& name, bool post, bool file) const {
+ for(const auto& p: _params){
+ if(p->name() == name && p->isPost() == post && p->isFile() == file){
+ return true;
+ }
+ }
+ return false;
+}
+
+bool AsyncWebServerRequest::hasParam(const __FlashStringHelper * data, bool post, bool file) const {
+ PGM_P p = reinterpret_cast(data);
+ size_t n = strlen_P(p);
+
+ char * name = (char*) malloc(n+1);
+ name[n] = 0;
+ if (name) {
+ strcpy_P(name,p);
+ bool result = hasParam( name, post, file);
+ free(name);
+ return result;
+ } else {
+ return false;
+ }
+}
+
+AsyncWebParameter* AsyncWebServerRequest::getParam(const String& name, bool post, bool file) const {
+ for(const auto& p: _params){
+ if(p->name() == name && p->isPost() == post && p->isFile() == file){
+ return p;
+ }
+ }
+ return nullptr;
+}
+
+AsyncWebParameter* AsyncWebServerRequest::getParam(const __FlashStringHelper * data, bool post, bool file) const {
+ PGM_P p = reinterpret_cast(data);
+ size_t n = strlen_P(p);
+ char * name = (char*) malloc(n+1);
+ if (name) {
+ strcpy_P(name, p);
+ AsyncWebParameter* result = getParam(name, post, file);
+ free(name);
+ return result;
+ } else {
+ return nullptr;
+ }
+}
+
+AsyncWebParameter* AsyncWebServerRequest::getParam(size_t num) const {
+ auto param = _params.nth(num);
+ return param ? *param : nullptr;
+}
+
+void AsyncWebServerRequest::addInterestingHeader(const String& name){
+ if(!_interestingHeaders.containsIgnoreCase(name))
+ _interestingHeaders.add(name);
+}
+
+void AsyncWebServerRequest::send(AsyncWebServerResponse *response){
+ _response = response;
+ if(_response == NULL){
+ _client->close(true);
+ _onDisconnect();
+ return;
+ }
+ if(!_response->_sourceValid()){
+ delete response;
+ _response = NULL;
+ send(500);
+ }
+ else {
+ _client->setRxTimeout(0);
+ _response->_respond(this);
+ }
+}
+
+AsyncWebServerResponse * AsyncWebServerRequest::beginResponse(int code, const String& contentType, const String& content){
+ return new AsyncBasicResponse(code, contentType, content);
+}
+
+AsyncWebServerResponse * AsyncWebServerRequest::beginResponse(FS &fs, const String& path, const String& contentType, bool download, AwsTemplateProcessor callback){
+ if(fs.exists(path) || (!download && fs.exists(path+".gz")))
+ return new AsyncFileResponse(fs, path, contentType, download, callback);
+ return NULL;
+}
+
+AsyncWebServerResponse * AsyncWebServerRequest::beginResponse(File content, const String& path, const String& contentType, bool download, AwsTemplateProcessor callback){
+ if(content == true)
+ return new AsyncFileResponse(content, path, contentType, download, callback);
+ return NULL;
+}
+
+AsyncWebServerResponse * AsyncWebServerRequest::beginResponse(Stream &stream, const String& contentType, size_t len, AwsTemplateProcessor callback){
+ return new AsyncStreamResponse(stream, contentType, len, callback);
+}
+
+AsyncWebServerResponse * AsyncWebServerRequest::beginResponse(const String& contentType, size_t len, AwsResponseFiller callback, AwsTemplateProcessor templateCallback){
+ return new AsyncCallbackResponse(contentType, len, callback, templateCallback);
+}
+
+AsyncWebServerResponse * AsyncWebServerRequest::beginChunkedResponse(const String& contentType, AwsResponseFiller callback, AwsTemplateProcessor templateCallback){
+ if(_version)
+ return new AsyncChunkedResponse(contentType, callback, templateCallback);
+ return new AsyncCallbackResponse(contentType, 0, callback, templateCallback);
+}
+
+AsyncResponseStream * AsyncWebServerRequest::beginResponseStream(const String& contentType, size_t bufferSize){
+ return new AsyncResponseStream(contentType, bufferSize);
+}
+
+AsyncWebServerResponse * AsyncWebServerRequest::beginResponse_P(int code, const String& contentType, const uint8_t * content, size_t len, AwsTemplateProcessor callback){
+ return new AsyncProgmemResponse(code, contentType, content, len, callback);
+}
+
+AsyncWebServerResponse * AsyncWebServerRequest::beginResponse_P(int code, const String& contentType, PGM_P content, AwsTemplateProcessor callback){
+ return beginResponse_P(code, contentType, (const uint8_t *)content, strlen_P(content), callback);
+}
+
+void AsyncWebServerRequest::send(int code, const String& contentType, const String& content){
+ send(beginResponse(code, contentType, content));
+}
+
+void AsyncWebServerRequest::send(FS &fs, const String& path, const String& contentType, bool download, AwsTemplateProcessor callback){
+ if(fs.exists(path) || (!download && fs.exists(path+".gz"))){
+ send(beginResponse(fs, path, contentType, download, callback));
+ } else send(404);
+}
+
+void AsyncWebServerRequest::send(File content, const String& path, const String& contentType, bool download, AwsTemplateProcessor callback){
+ if(content == true){
+ send(beginResponse(content, path, contentType, download, callback));
+ } else send(404);
+}
+
+void AsyncWebServerRequest::send(Stream &stream, const String& contentType, size_t len, AwsTemplateProcessor callback){
+ send(beginResponse(stream, contentType, len, callback));
+}
+
+void AsyncWebServerRequest::send(const String& contentType, size_t len, AwsResponseFiller callback, AwsTemplateProcessor templateCallback){
+ send(beginResponse(contentType, len, callback, templateCallback));
+}
+
+void AsyncWebServerRequest::sendChunked(const String& contentType, AwsResponseFiller callback, AwsTemplateProcessor templateCallback){
+ send(beginChunkedResponse(contentType, callback, templateCallback));
+}
+
+void AsyncWebServerRequest::send_P(int code, const String& contentType, const uint8_t * content, size_t len, AwsTemplateProcessor callback){
+ send(beginResponse_P(code, contentType, content, len, callback));
+}
+
+void AsyncWebServerRequest::send_P(int code, const String& contentType, PGM_P content, AwsTemplateProcessor callback){
+ send(beginResponse_P(code, contentType, content, callback));
+}
+
+void AsyncWebServerRequest::redirect(const String& url){
+ AsyncWebServerResponse * response = beginResponse(302);
+ response->addHeader("Location",url);
+ send(response);
+}
+
+bool AsyncWebServerRequest::authenticate(const char * username, const char * password, const char * realm, bool passwordIsHash){
+ if(_authorization.length()){
+ if(_isDigest)
+ return checkDigestAuthentication(_authorization.c_str(), methodToString(), username, password, realm, passwordIsHash, NULL, NULL, NULL);
+ else if(!passwordIsHash)
+ return checkBasicAuthentication(_authorization.c_str(), username, password);
+ else
+ return _authorization.equals(password);
+ }
+ return false;
+}
+
+bool AsyncWebServerRequest::authenticate(const char * hash){
+ if(!_authorization.length() || hash == NULL)
+ return false;
+
+ if(_isDigest){
+ String hStr = String(hash);
+ int separator = hStr.indexOf(":");
+ if(separator <= 0)
+ return false;
+ String username = hStr.substring(0, separator);
+ hStr = hStr.substring(separator + 1);
+ separator = hStr.indexOf(":");
+ if(separator <= 0)
+ return false;
+ String realm = hStr.substring(0, separator);
+ hStr = hStr.substring(separator + 1);
+ return checkDigestAuthentication(_authorization.c_str(), methodToString(), username.c_str(), hStr.c_str(), realm.c_str(), true, NULL, NULL, NULL);
+ }
+
+ return (_authorization.equals(hash));
+}
+
+void AsyncWebServerRequest::requestAuthentication(const char * realm, bool isDigest){
+ AsyncWebServerResponse * r = beginResponse(401);
+ if(!isDigest && realm == NULL){
+ r->addHeader("WWW-Authenticate", "Basic realm=\"Login Required\"");
+ } else if(!isDigest){
+ String header = "Basic realm=\"";
+ header.concat(realm);
+ header.concat("\"");
+ r->addHeader("WWW-Authenticate", header);
+ } else {
+ String header = "Digest ";
+ header.concat(requestDigestAuthentication(realm));
+ r->addHeader("WWW-Authenticate", header);
+ }
+ send(r);
+}
+
+bool AsyncWebServerRequest::hasArg(const char* name) const {
+ for(const auto& arg: _params){
+ if(arg->name() == name){
+ return true;
+ }
+ }
+ return false;
+}
+
+bool AsyncWebServerRequest::hasArg(const __FlashStringHelper * data) const {
+ PGM_P p = reinterpret_cast(data);
+ size_t n = strlen_P(p);
+ char * name = (char*) malloc(n+1);
+ if (name) {
+ strcpy_P(name, p);
+ bool result = hasArg( name );
+ free(name);
+ return result;
+ } else {
+ return false;
+ }
+}
+
+
+const String& AsyncWebServerRequest::arg(const String& name) const {
+ for(const auto& arg: _params){
+ if(arg->name() == name){
+ return arg->value();
+ }
+ }
+ return SharedEmptyString;
+}
+
+const String& AsyncWebServerRequest::arg(const __FlashStringHelper * data) const {
+ PGM_P p = reinterpret_cast(data);
+ size_t n = strlen_P(p);
+ char * name = (char*) malloc(n+1);
+ if (name) {
+ strcpy_P(name, p);
+ const String & result = arg( String(name) );
+ free(name);
+ return result;
+ } else {
+ return SharedEmptyString;
+ }
+
+}
+
+const String& AsyncWebServerRequest::arg(size_t i) const {
+ return getParam(i)->value();
+}
+
+const String& AsyncWebServerRequest::argName(size_t i) const {
+ return getParam(i)->name();
+}
+
+const String& AsyncWebServerRequest::pathArg(size_t i) const {
+ auto param = _pathParams.nth(i);
+ return param ? **param : SharedEmptyString;
+}
+
+const String& AsyncWebServerRequest::header(const char* name) const {
+ AsyncWebHeader* h = getHeader(String(name));
+ return h ? h->value() : SharedEmptyString;
+}
+
+const String& AsyncWebServerRequest::header(const __FlashStringHelper * data) const {
+ PGM_P p = reinterpret_cast(data);
+ size_t n = strlen_P(p);
+ char * name = (char*) malloc(n+1);
+ if (name) {
+ strcpy_P(name, p);
+ const String & result = header( (const char *)name );
+ free(name);
+ return result;
+ } else {
+ return SharedEmptyString;
+ }
+};
+
+
+const String& AsyncWebServerRequest::header(size_t i) const {
+ AsyncWebHeader* h = getHeader(i);
+ return h ? h->value() : SharedEmptyString;
+}
+
+const String& AsyncWebServerRequest::headerName(size_t i) const {
+ AsyncWebHeader* h = getHeader(i);
+ return h ? h->name() : SharedEmptyString;
+}
+
+String AsyncWebServerRequest::urlDecode(const String& text) const {
+ char temp[] = "0x00";
+ unsigned int len = text.length();
+ unsigned int i = 0;
+ String decoded = String();
+ decoded.reserve(len); // Allocate the string internal buffer - never longer from source text
+ while (i < len){
+ char decodedChar;
+ char encodedChar = text.charAt(i++);
+ if ((encodedChar == '%') && (i + 1 < len)){
+ temp[2] = text.charAt(i++);
+ temp[3] = text.charAt(i++);
+ decodedChar = strtol(temp, NULL, 16);
+ } else if (encodedChar == '+') {
+ decodedChar = ' ';
+ } else {
+ decodedChar = encodedChar; // normal ascii char
+ }
+ decoded.concat(decodedChar);
+ }
+ return decoded;
+}
+
+
+const char * AsyncWebServerRequest::methodToString() const {
+ if(_method == HTTP_ANY) return "ANY";
+ else if(_method & HTTP_GET) return "GET";
+ else if(_method & HTTP_POST) return "POST";
+ else if(_method & HTTP_DELETE) return "DELETE";
+ else if(_method & HTTP_PUT) return "PUT";
+ else if(_method & HTTP_PATCH) return "PATCH";
+ else if(_method & HTTP_HEAD) return "HEAD";
+ else if(_method & HTTP_OPTIONS) return "OPTIONS";
+ return "UNKNOWN";
+}
+
+const char *AsyncWebServerRequest::requestedConnTypeToString() const {
+ switch (_reqconntype) {
+ case RCT_NOT_USED: return "RCT_NOT_USED";
+ case RCT_DEFAULT: return "RCT_DEFAULT";
+ case RCT_HTTP: return "RCT_HTTP";
+ case RCT_WS: return "RCT_WS";
+ case RCT_EVENT: return "RCT_EVENT";
+ default: return "ERROR";
+ }
+}
+
+bool AsyncWebServerRequest::isExpectedRequestedConnType(RequestedConnectionType erct1, RequestedConnectionType erct2, RequestedConnectionType erct3) {
+ bool res = false;
+ if ((erct1 != RCT_NOT_USED) && (erct1 == _reqconntype)) res = true;
+ if ((erct2 != RCT_NOT_USED) && (erct2 == _reqconntype)) res = true;
+ if ((erct3 != RCT_NOT_USED) && (erct3 == _reqconntype)) res = true;
+ return res;
+}
diff --git a/lib/libesp32/ESPAsyncWebServer/src/WebResponseImpl.h b/lib/libesp32/ESPAsyncWebServer/src/WebResponseImpl.h
new file mode 100644
index 000000000..9a64e3a52
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/src/WebResponseImpl.h
@@ -0,0 +1,136 @@
+/*
+ Asynchronous WebServer library for Espressif MCUs
+
+ Copyright (c) 2016 Hristo Gochkov. All rights reserved.
+ This file is part of the esp8266 core for Arduino environment.
+
+ This library is free software; you can redistribute it and/or
+ modify it under the terms of the GNU Lesser General Public
+ License as published by the Free Software Foundation; either
+ version 2.1 of the License, or (at your option) any later version.
+
+ This library is distributed in the hope that it will be useful,
+ but WITHOUT ANY WARRANTY; without even the implied warranty of
+ MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
+ Lesser General Public License for more details.
+
+ You should have received a copy of the GNU Lesser General Public
+ License along with this library; if not, write to the Free Software
+ Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
+*/
+#ifndef ASYNCWEBSERVERRESPONSEIMPL_H_
+#define ASYNCWEBSERVERRESPONSEIMPL_H_
+
+#ifdef Arduino_h
+// arduino is not compatible with std::vector
+#undef min
+#undef max
+#endif
+#include
+// It is possible to restore these defines, but one can use _min and _max instead. Or std::min, std::max.
+
+class AsyncBasicResponse: public AsyncWebServerResponse {
+ private:
+ String _content;
+ public:
+ AsyncBasicResponse(int code, const String& contentType=String(), const String& content=String());
+ void _respond(AsyncWebServerRequest *request);
+ size_t _ack(AsyncWebServerRequest *request, size_t len, uint32_t time);
+ bool _sourceValid() const { return true; }
+};
+
+class AsyncAbstractResponse: public AsyncWebServerResponse {
+ private:
+ String _head;
+ // Data is inserted into cache at begin().
+ // This is inefficient with vector, but if we use some other container,
+ // we won't be able to access it as contiguous array of bytes when reading from it,
+ // so by gaining performance in one place, we'll lose it in another.
+ std::vector _cache;
+ size_t _readDataFromCacheOrContent(uint8_t* data, const size_t len);
+ size_t _fillBufferAndProcessTemplates(uint8_t* buf, size_t maxLen);
+ protected:
+ AwsTemplateProcessor _callback;
+ public:
+ AsyncAbstractResponse(AwsTemplateProcessor callback=nullptr);
+ void _respond(AsyncWebServerRequest *request);
+ size_t _ack(AsyncWebServerRequest *request, size_t len, uint32_t time);
+ bool _sourceValid() const { return false; }
+ virtual size_t _fillBuffer(uint8_t *buf __attribute__((unused)), size_t maxLen __attribute__((unused))) { return 0; }
+};
+
+#ifndef TEMPLATE_PLACEHOLDER
+#define TEMPLATE_PLACEHOLDER '%'
+#endif
+
+#define TEMPLATE_PARAM_NAME_LENGTH 32
+class AsyncFileResponse: public AsyncAbstractResponse {
+ using File = fs::File;
+ using FS = fs::FS;
+ private:
+ File _content;
+ String _path;
+ void _setContentType(const String& path);
+ public:
+ AsyncFileResponse(FS &fs, const String& path, const String& contentType=String(), bool download=false, AwsTemplateProcessor callback=nullptr);
+ AsyncFileResponse(File content, const String& path, const String& contentType=String(), bool download=false, AwsTemplateProcessor callback=nullptr);
+ ~AsyncFileResponse();
+ bool _sourceValid() const { return !!(_content); }
+ virtual size_t _fillBuffer(uint8_t *buf, size_t maxLen) override;
+};
+
+class AsyncStreamResponse: public AsyncAbstractResponse {
+ private:
+ Stream *_content;
+ public:
+ AsyncStreamResponse(Stream &stream, const String& contentType, size_t len, AwsTemplateProcessor callback=nullptr);
+ bool _sourceValid() const { return !!(_content); }
+ virtual size_t _fillBuffer(uint8_t *buf, size_t maxLen) override;
+};
+
+class AsyncCallbackResponse: public AsyncAbstractResponse {
+ private:
+ AwsResponseFiller _content;
+ size_t _filledLength;
+ public:
+ AsyncCallbackResponse(const String& contentType, size_t len, AwsResponseFiller callback, AwsTemplateProcessor templateCallback=nullptr);
+ bool _sourceValid() const { return !!(_content); }
+ virtual size_t _fillBuffer(uint8_t *buf, size_t maxLen) override;
+};
+
+class AsyncChunkedResponse: public AsyncAbstractResponse {
+ private:
+ AwsResponseFiller _content;
+ size_t _filledLength;
+ public:
+ AsyncChunkedResponse(const String& contentType, AwsResponseFiller callback, AwsTemplateProcessor templateCallback=nullptr);
+ bool _sourceValid() const { return !!(_content); }
+ virtual size_t _fillBuffer(uint8_t *buf, size_t maxLen) override;
+};
+
+class AsyncProgmemResponse: public AsyncAbstractResponse {
+ private:
+ const uint8_t * _content;
+ size_t _readLength;
+ public:
+ AsyncProgmemResponse(int code, const String& contentType, const uint8_t * content, size_t len, AwsTemplateProcessor callback=nullptr);
+ bool _sourceValid() const { return true; }
+ virtual size_t _fillBuffer(uint8_t *buf, size_t maxLen) override;
+};
+
+class cbuf;
+
+class AsyncResponseStream: public AsyncAbstractResponse, public Print {
+ private:
+ cbuf *_content;
+ public:
+ AsyncResponseStream(const String& contentType, size_t bufferSize);
+ ~AsyncResponseStream();
+ bool _sourceValid() const { return (_state < RESPONSE_END); }
+ virtual size_t _fillBuffer(uint8_t *buf, size_t maxLen) override;
+ size_t write(const uint8_t *data, size_t len);
+ size_t write(uint8_t data);
+ using Print::write;
+};
+
+#endif /* ASYNCWEBSERVERRESPONSEIMPL_H_ */
diff --git a/lib/libesp32/ESPAsyncWebServer/src/WebResponses.cpp b/lib/libesp32/ESPAsyncWebServer/src/WebResponses.cpp
new file mode 100644
index 000000000..cc66b00ea
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/src/WebResponses.cpp
@@ -0,0 +1,699 @@
+/*
+ Asynchronous WebServer library for Espressif MCUs
+
+ Copyright (c) 2016 Hristo Gochkov. All rights reserved.
+ This file is part of the esp8266 core for Arduino environment.
+
+ This library is free software; you can redistribute it and/or
+ modify it under the terms of the GNU Lesser General Public
+ License as published by the Free Software Foundation; either
+ version 2.1 of the License, or (at your option) any later version.
+
+ This library is distributed in the hope that it will be useful,
+ but WITHOUT ANY WARRANTY; without even the implied warranty of
+ MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
+ Lesser General Public License for more details.
+
+ You should have received a copy of the GNU Lesser General Public
+ License along with this library; if not, write to the Free Software
+ Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
+*/
+#include "ESPAsyncWebServer.h"
+#include "WebResponseImpl.h"
+#include "cbuf.h"
+
+// Since ESP8266 does not link memchr by default, here's its implementation.
+void* memchr(void* ptr, int ch, size_t count)
+{
+ unsigned char* p = static_cast(ptr);
+ while(count--)
+ if(*p++ == static_cast(ch))
+ return --p;
+ return nullptr;
+}
+
+
+/*
+ * Abstract Response
+ * */
+const char* AsyncWebServerResponse::_responseCodeToString(int code) {
+ switch (code) {
+ case 100: return "Continue";
+ case 101: return "Switching Protocols";
+ case 200: return "OK";
+ case 201: return "Created";
+ case 202: return "Accepted";
+ case 203: return "Non-Authoritative Information";
+ case 204: return "No Content";
+ case 205: return "Reset Content";
+ case 206: return "Partial Content";
+ case 300: return "Multiple Choices";
+ case 301: return "Moved Permanently";
+ case 302: return "Found";
+ case 303: return "See Other";
+ case 304: return "Not Modified";
+ case 305: return "Use Proxy";
+ case 307: return "Temporary Redirect";
+ case 400: return "Bad Request";
+ case 401: return "Unauthorized";
+ case 402: return "Payment Required";
+ case 403: return "Forbidden";
+ case 404: return "Not Found";
+ case 405: return "Method Not Allowed";
+ case 406: return "Not Acceptable";
+ case 407: return "Proxy Authentication Required";
+ case 408: return "Request Time-out";
+ case 409: return "Conflict";
+ case 410: return "Gone";
+ case 411: return "Length Required";
+ case 412: return "Precondition Failed";
+ case 413: return "Request Entity Too Large";
+ case 414: return "Request-URI Too Large";
+ case 415: return "Unsupported Media Type";
+ case 416: return "Requested range not satisfiable";
+ case 417: return "Expectation Failed";
+ case 500: return "Internal Server Error";
+ case 501: return "Not Implemented";
+ case 502: return "Bad Gateway";
+ case 503: return "Service Unavailable";
+ case 504: return "Gateway Time-out";
+ case 505: return "HTTP Version not supported";
+ default: return "";
+ }
+}
+
+AsyncWebServerResponse::AsyncWebServerResponse()
+ : _code(0)
+ , _headers(AsyncLinkedList([](AsyncWebHeader *h){ delete h; }))
+ , _contentType()
+ , _contentLength(0)
+ , _sendContentLength(true)
+ , _chunked(false)
+ , _headLength(0)
+ , _sentLength(0)
+ , _ackedLength(0)
+ , _writtenLength(0)
+ , _state(RESPONSE_SETUP)
+{
+ for(auto header: DefaultHeaders::Instance()) {
+ _headers.add(new AsyncWebHeader(header->name(), header->value()));
+ }
+}
+
+AsyncWebServerResponse::~AsyncWebServerResponse(){
+ _headers.free();
+}
+
+void AsyncWebServerResponse::setCode(int code){
+ if(_state == RESPONSE_SETUP)
+ _code = code;
+}
+
+void AsyncWebServerResponse::setContentLength(size_t len){
+ if(_state == RESPONSE_SETUP)
+ _contentLength = len;
+}
+
+void AsyncWebServerResponse::setContentType(const String& type){
+ if(_state == RESPONSE_SETUP)
+ _contentType = type;
+}
+
+void AsyncWebServerResponse::addHeader(const String& name, const String& value){
+ _headers.add(new AsyncWebHeader(name, value));
+}
+
+String AsyncWebServerResponse::_assembleHead(uint8_t version){
+ if(version){
+ addHeader("Accept-Ranges","none");
+ if(_chunked)
+ addHeader("Transfer-Encoding","chunked");
+ }
+ String out = String();
+ int bufSize = 300;
+ char buf[bufSize];
+
+ snprintf(buf, bufSize, "HTTP/1.%d %d %s\r\n", version, _code, _responseCodeToString(_code));
+ out.concat(buf);
+
+ if(_sendContentLength) {
+ snprintf(buf, bufSize, "Content-Length: %d\r\n", _contentLength);
+ out.concat(buf);
+ }
+ if(_contentType.length()) {
+ snprintf(buf, bufSize, "Content-Type: %s\r\n", _contentType.c_str());
+ out.concat(buf);
+ }
+
+ for(const auto& header: _headers){
+ snprintf(buf, bufSize, "%s: %s\r\n", header->name().c_str(), header->value().c_str());
+ out.concat(buf);
+ }
+ _headers.free();
+
+ out.concat("\r\n");
+ _headLength = out.length();
+ return out;
+}
+
+bool AsyncWebServerResponse::_started() const { return _state > RESPONSE_SETUP; }
+bool AsyncWebServerResponse::_finished() const { return _state > RESPONSE_WAIT_ACK; }
+bool AsyncWebServerResponse::_failed() const { return _state == RESPONSE_FAILED; }
+bool AsyncWebServerResponse::_sourceValid() const { return false; }
+void AsyncWebServerResponse::_respond(AsyncWebServerRequest *request){ _state = RESPONSE_END; request->client()->close(); }
+size_t AsyncWebServerResponse::_ack(AsyncWebServerRequest *request, size_t len, uint32_t time){ (void)request; (void)len; (void)time; return 0; }
+
+/*
+ * String/Code Response
+ * */
+AsyncBasicResponse::AsyncBasicResponse(int code, const String& contentType, const String& content){
+ _code = code;
+ _content = content;
+ _contentType = contentType;
+ if(_content.length()){
+ _contentLength = _content.length();
+ if(!_contentType.length())
+ _contentType = "text/plain";
+ }
+ addHeader("Connection","close");
+}
+
+void AsyncBasicResponse::_respond(AsyncWebServerRequest *request){
+ _state = RESPONSE_HEADERS;
+ String out = _assembleHead(request->version());
+ size_t outLen = out.length();
+ size_t space = request->client()->space();
+ if(!_contentLength && space >= outLen){
+ _writtenLength += request->client()->write(out.c_str(), outLen);
+ _state = RESPONSE_WAIT_ACK;
+ } else if(_contentLength && space >= outLen + _contentLength){
+ out += _content;
+ outLen += _contentLength;
+ _writtenLength += request->client()->write(out.c_str(), outLen);
+ _state = RESPONSE_WAIT_ACK;
+ } else if(space && space < outLen){
+ String partial = out.substring(0, space);
+ _content = out.substring(space) + _content;
+ _contentLength += outLen - space;
+ _writtenLength += request->client()->write(partial.c_str(), partial.length());
+ _state = RESPONSE_CONTENT;
+ } else if(space > outLen && space < (outLen + _contentLength)){
+ size_t shift = space - outLen;
+ outLen += shift;
+ _sentLength += shift;
+ out += _content.substring(0, shift);
+ _content = _content.substring(shift);
+ _writtenLength += request->client()->write(out.c_str(), outLen);
+ _state = RESPONSE_CONTENT;
+ } else {
+ _content = out + _content;
+ _contentLength += outLen;
+ _state = RESPONSE_CONTENT;
+ }
+}
+
+size_t AsyncBasicResponse::_ack(AsyncWebServerRequest *request, size_t len, uint32_t time){
+ (void)time;
+ _ackedLength += len;
+ if(_state == RESPONSE_CONTENT){
+ size_t available = _contentLength - _sentLength;
+ size_t space = request->client()->space();
+ //we can fit in this packet
+ if(space > available){
+ _writtenLength += request->client()->write(_content.c_str(), available);
+ _content = String();
+ _state = RESPONSE_WAIT_ACK;
+ return available;
+ }
+ //send some data, the rest on ack
+ String out = _content.substring(0, space);
+ _content = _content.substring(space);
+ _sentLength += space;
+ _writtenLength += request->client()->write(out.c_str(), space);
+ return space;
+ } else if(_state == RESPONSE_WAIT_ACK){
+ if(_ackedLength >= _writtenLength){
+ _state = RESPONSE_END;
+ }
+ }
+ return 0;
+}
+
+
+/*
+ * Abstract Response
+ * */
+
+AsyncAbstractResponse::AsyncAbstractResponse(AwsTemplateProcessor callback): _callback(callback)
+{
+ // In case of template processing, we're unable to determine real response size
+ if(callback) {
+ _contentLength = 0;
+ _sendContentLength = false;
+ _chunked = true;
+ }
+}
+
+void AsyncAbstractResponse::_respond(AsyncWebServerRequest *request){
+ addHeader("Connection","close");
+ _head = _assembleHead(request->version());
+ _state = RESPONSE_HEADERS;
+ _ack(request, 0, 0);
+}
+
+size_t AsyncAbstractResponse::_ack(AsyncWebServerRequest *request, size_t len, uint32_t time){
+ (void)time;
+ if(!_sourceValid()){
+ _state = RESPONSE_FAILED;
+ request->client()->close();
+ return 0;
+ }
+ _ackedLength += len;
+ size_t space = request->client()->space();
+
+ size_t headLen = _head.length();
+ if(_state == RESPONSE_HEADERS){
+ if(space >= headLen){
+ _state = RESPONSE_CONTENT;
+ space -= headLen;
+ } else {
+ String out = _head.substring(0, space);
+ _head = _head.substring(space);
+ _writtenLength += request->client()->write(out.c_str(), out.length());
+ return out.length();
+ }
+ }
+
+ if(_state == RESPONSE_CONTENT){
+ size_t outLen;
+ if(_chunked){
+ if(space <= 8){
+ return 0;
+ }
+ outLen = space;
+ } else if(!_sendContentLength){
+ outLen = space;
+ } else {
+ outLen = ((_contentLength - _sentLength) > space)?space:(_contentLength - _sentLength);
+ }
+
+ uint8_t *buf = (uint8_t *)malloc(outLen+headLen);
+ if (!buf) {
+ // os_printf("_ack malloc %d failed\n", outLen+headLen);
+ return 0;
+ }
+
+ if(headLen){
+ memcpy(buf, _head.c_str(), _head.length());
+ }
+
+ size_t readLen = 0;
+
+ if(_chunked){
+ // HTTP 1.1 allows leading zeros in chunk length. Or spaces may be added.
+ // See RFC2616 sections 2, 3.6.1.
+ readLen = _fillBufferAndProcessTemplates(buf+headLen+6, outLen - 8);
+ if(readLen == RESPONSE_TRY_AGAIN){
+ free(buf);
+ return 0;
+ }
+ outLen = sprintf((char*)buf+headLen, "%x", readLen) + headLen;
+ while(outLen < headLen + 4) buf[outLen++] = ' ';
+ buf[outLen++] = '\r';
+ buf[outLen++] = '\n';
+ outLen += readLen;
+ buf[outLen++] = '\r';
+ buf[outLen++] = '\n';
+ } else {
+ readLen = _fillBufferAndProcessTemplates(buf+headLen, outLen);
+ if(readLen == RESPONSE_TRY_AGAIN){
+ free(buf);
+ return 0;
+ }
+ outLen = readLen + headLen;
+ }
+
+ if(headLen){
+ _head = String();
+ }
+
+ if(outLen){
+ _writtenLength += request->client()->write((const char*)buf, outLen);
+ }
+
+ if(_chunked){
+ _sentLength += readLen;
+ } else {
+ _sentLength += outLen - headLen;
+ }
+
+ free(buf);
+
+ if((_chunked && readLen == 0) || (!_sendContentLength && outLen == 0) || (!_chunked && _sentLength == _contentLength)){
+ _state = RESPONSE_WAIT_ACK;
+ }
+ return outLen;
+
+ } else if(_state == RESPONSE_WAIT_ACK){
+ if(!_sendContentLength || _ackedLength >= _writtenLength){
+ _state = RESPONSE_END;
+ if(!_chunked && !_sendContentLength)
+ request->client()->close(true);
+ }
+ }
+ return 0;
+}
+
+size_t AsyncAbstractResponse::_readDataFromCacheOrContent(uint8_t* data, const size_t len)
+{
+ // If we have something in cache, copy it to buffer
+ const size_t readFromCache = std::min(len, _cache.size());
+ if(readFromCache) {
+ memcpy(data, _cache.data(), readFromCache);
+ _cache.erase(_cache.begin(), _cache.begin() + readFromCache);
+ }
+ // If we need to read more...
+ const size_t needFromFile = len - readFromCache;
+ const size_t readFromContent = _fillBuffer(data + readFromCache, needFromFile);
+ return readFromCache + readFromContent;
+}
+
+size_t AsyncAbstractResponse::_fillBufferAndProcessTemplates(uint8_t* data, size_t len)
+{
+ if(!_callback)
+ return _fillBuffer(data, len);
+
+ const size_t originalLen = len;
+ len = _readDataFromCacheOrContent(data, len);
+ // Now we've read 'len' bytes, either from cache or from file
+ // Search for template placeholders
+ uint8_t* pTemplateStart = data;
+ while((pTemplateStart < &data[len]) && (pTemplateStart = (uint8_t*)memchr(pTemplateStart, TEMPLATE_PLACEHOLDER, &data[len - 1] - pTemplateStart + 1))) { // data[0] ... data[len - 1]
+ uint8_t* pTemplateEnd = (pTemplateStart < &data[len - 1]) ? (uint8_t*)memchr(pTemplateStart + 1, TEMPLATE_PLACEHOLDER, &data[len - 1] - pTemplateStart) : nullptr;
+ // temporary buffer to hold parameter name
+ uint8_t buf[TEMPLATE_PARAM_NAME_LENGTH + 1];
+ String paramName;
+ // If closing placeholder is found:
+ if(pTemplateEnd) {
+ // prepare argument to callback
+ const size_t paramNameLength = std::min(sizeof(buf) - 1, (unsigned int)(pTemplateEnd - pTemplateStart - 1));
+ if(paramNameLength) {
+ memcpy(buf, pTemplateStart + 1, paramNameLength);
+ buf[paramNameLength] = 0;
+ paramName = String(reinterpret_cast(buf));
+ } else { // double percent sign encountered, this is single percent sign escaped.
+ // remove the 2nd percent sign
+ memmove(pTemplateEnd, pTemplateEnd + 1, &data[len] - pTemplateEnd - 1);
+ len += _readDataFromCacheOrContent(&data[len - 1], 1) - 1;
+ ++pTemplateStart;
+ }
+ } else if(&data[len - 1] - pTemplateStart + 1 < TEMPLATE_PARAM_NAME_LENGTH + 2) { // closing placeholder not found, check if it's in the remaining file data
+ memcpy(buf, pTemplateStart + 1, &data[len - 1] - pTemplateStart);
+ const size_t readFromCacheOrContent = _readDataFromCacheOrContent(buf + (&data[len - 1] - pTemplateStart), TEMPLATE_PARAM_NAME_LENGTH + 2 - (&data[len - 1] - pTemplateStart + 1));
+ if(readFromCacheOrContent) {
+ pTemplateEnd = (uint8_t*)memchr(buf + (&data[len - 1] - pTemplateStart), TEMPLATE_PLACEHOLDER, readFromCacheOrContent);
+ if(pTemplateEnd) {
+ // prepare argument to callback
+ *pTemplateEnd = 0;
+ paramName = String(reinterpret_cast(buf));
+ // Copy remaining read-ahead data into cache
+ _cache.insert(_cache.begin(), pTemplateEnd + 1, buf + (&data[len - 1] - pTemplateStart) + readFromCacheOrContent);
+ pTemplateEnd = &data[len - 1];
+ }
+ else // closing placeholder not found in file data, store found percent symbol as is and advance to the next position
+ {
+ // but first, store read file data in cache
+ _cache.insert(_cache.begin(), buf + (&data[len - 1] - pTemplateStart), buf + (&data[len - 1] - pTemplateStart) + readFromCacheOrContent);
+ ++pTemplateStart;
+ }
+ }
+ else // closing placeholder not found in content data, store found percent symbol as is and advance to the next position
+ ++pTemplateStart;
+ }
+ else // closing placeholder not found in content data, store found percent symbol as is and advance to the next position
+ ++pTemplateStart;
+ if(paramName.length()) {
+ // call callback and replace with result.
+ // Everything in range [pTemplateStart, pTemplateEnd] can be safely replaced with parameter value.
+ // Data after pTemplateEnd may need to be moved.
+ // The first byte of data after placeholder is located at pTemplateEnd + 1.
+ // It should be located at pTemplateStart + numBytesCopied (to begin right after inserted parameter value).
+ const String paramValue(_callback(paramName));
+ const char* pvstr = paramValue.c_str();
+ const unsigned int pvlen = paramValue.length();
+ const size_t numBytesCopied = std::min(pvlen, static_cast(&data[originalLen - 1] - pTemplateStart + 1));
+ // make room for param value
+ // 1. move extra data to cache if parameter value is longer than placeholder AND if there is no room to store
+ if((pTemplateEnd + 1 < pTemplateStart + numBytesCopied) && (originalLen - (pTemplateStart + numBytesCopied - pTemplateEnd - 1) < len)) {
+ _cache.insert(_cache.begin(), &data[originalLen - (pTemplateStart + numBytesCopied - pTemplateEnd - 1)], &data[len]);
+ //2. parameter value is longer than placeholder text, push the data after placeholder which not saved into cache further to the end
+ memmove(pTemplateStart + numBytesCopied, pTemplateEnd + 1, &data[originalLen] - pTemplateStart - numBytesCopied);
+ len = originalLen; // fix issue with truncated data, not sure if it has any side effects
+ } else if(pTemplateEnd + 1 != pTemplateStart + numBytesCopied)
+ //2. Either parameter value is shorter than placeholder text OR there is enough free space in buffer to fit.
+ // Move the entire data after the placeholder
+ memmove(pTemplateStart + numBytesCopied, pTemplateEnd + 1, &data[len] - pTemplateEnd - 1);
+ // 3. replace placeholder with actual value
+ memcpy(pTemplateStart, pvstr, numBytesCopied);
+ // If result is longer than buffer, copy the remainder into cache (this could happen only if placeholder text itself did not fit entirely in buffer)
+ if(numBytesCopied < pvlen) {
+ _cache.insert(_cache.begin(), pvstr + numBytesCopied, pvstr + pvlen);
+ } else if(pTemplateStart + numBytesCopied < pTemplateEnd + 1) { // result is copied fully; if result is shorter than placeholder text...
+ // there is some free room, fill it from cache
+ const size_t roomFreed = pTemplateEnd + 1 - pTemplateStart - numBytesCopied;
+ const size_t totalFreeRoom = originalLen - len + roomFreed;
+ len += _readDataFromCacheOrContent(&data[len - roomFreed], totalFreeRoom) - roomFreed;
+ } else { // result is copied fully; it is longer than placeholder text
+ const size_t roomTaken = pTemplateStart + numBytesCopied - pTemplateEnd - 1;
+ len = std::min(len + roomTaken, originalLen);
+ }
+ }
+ } // while(pTemplateStart)
+ return len;
+}
+
+
+/*
+ * File Response
+ * */
+
+AsyncFileResponse::~AsyncFileResponse(){
+ if(_content)
+ _content.close();
+}
+
+void AsyncFileResponse::_setContentType(const String& path){
+ if (path.endsWith(".html")) _contentType = "text/html";
+ else if (path.endsWith(".htm")) _contentType = "text/html";
+ else if (path.endsWith(".css")) _contentType = "text/css";
+ else if (path.endsWith(".json")) _contentType = "application/json";
+ else if (path.endsWith(".js")) _contentType = "application/javascript";
+ else if (path.endsWith(".png")) _contentType = "image/png";
+ else if (path.endsWith(".gif")) _contentType = "image/gif";
+ else if (path.endsWith(".jpg")) _contentType = "image/jpeg";
+ else if (path.endsWith(".ico")) _contentType = "image/x-icon";
+ else if (path.endsWith(".svg")) _contentType = "image/svg+xml";
+ else if (path.endsWith(".eot")) _contentType = "font/eot";
+ else if (path.endsWith(".woff")) _contentType = "font/woff";
+ else if (path.endsWith(".woff2")) _contentType = "font/woff2";
+ else if (path.endsWith(".ttf")) _contentType = "font/ttf";
+ else if (path.endsWith(".xml")) _contentType = "text/xml";
+ else if (path.endsWith(".pdf")) _contentType = "application/pdf";
+ else if (path.endsWith(".zip")) _contentType = "application/zip";
+ else if(path.endsWith(".gz")) _contentType = "application/x-gzip";
+ else _contentType = "text/plain";
+}
+
+AsyncFileResponse::AsyncFileResponse(FS &fs, const String& path, const String& contentType, bool download, AwsTemplateProcessor callback): AsyncAbstractResponse(callback){
+ _code = 200;
+ _path = path;
+
+ if(!download && !fs.exists(_path) && fs.exists(_path+".gz")){
+ _path = _path+".gz";
+ addHeader("Content-Encoding", "gzip");
+ _callback = nullptr; // Unable to process zipped templates
+ _sendContentLength = true;
+ _chunked = false;
+ }
+
+ _content = fs.open(_path, "r");
+ _contentLength = _content.size();
+
+ if(contentType == "")
+ _setContentType(path);
+ else
+ _contentType = contentType;
+
+ int filenameStart = path.lastIndexOf('/') + 1;
+ char buf[26+path.length()-filenameStart];
+ char* filename = (char*)path.c_str() + filenameStart;
+
+ if(download) {
+ // set filename and force download
+ snprintf(buf, sizeof (buf), "attachment; filename=\"%s\"", filename);
+ } else {
+ // set filename and force rendering
+ snprintf(buf, sizeof (buf), "inline; filename=\"%s\"", filename);
+ }
+ addHeader("Content-Disposition", buf);
+}
+
+AsyncFileResponse::AsyncFileResponse(File content, const String& path, const String& contentType, bool download, AwsTemplateProcessor callback): AsyncAbstractResponse(callback){
+ _code = 200;
+ _path = path;
+
+ if(!download && String(content.name()).endsWith(".gz") && !path.endsWith(".gz")){
+ addHeader("Content-Encoding", "gzip");
+ _callback = nullptr; // Unable to process gzipped templates
+ _sendContentLength = true;
+ _chunked = false;
+ }
+
+ _content = content;
+ _contentLength = _content.size();
+
+ if(contentType == "")
+ _setContentType(path);
+ else
+ _contentType = contentType;
+
+ int filenameStart = path.lastIndexOf('/') + 1;
+ char buf[26+path.length()-filenameStart];
+ char* filename = (char*)path.c_str() + filenameStart;
+
+ if(download) {
+ snprintf(buf, sizeof (buf), "attachment; filename=\"%s\"", filename);
+ } else {
+ snprintf(buf, sizeof (buf), "inline; filename=\"%s\"", filename);
+ }
+ addHeader("Content-Disposition", buf);
+}
+
+size_t AsyncFileResponse::_fillBuffer(uint8_t *data, size_t len){
+ return _content.read(data, len);
+}
+
+/*
+ * Stream Response
+ * */
+
+AsyncStreamResponse::AsyncStreamResponse(Stream &stream, const String& contentType, size_t len, AwsTemplateProcessor callback): AsyncAbstractResponse(callback) {
+ _code = 200;
+ _content = &stream;
+ _contentLength = len;
+ _contentType = contentType;
+}
+
+size_t AsyncStreamResponse::_fillBuffer(uint8_t *data, size_t len){
+ size_t available = _content->available();
+ size_t outLen = (available > len)?len:available;
+ size_t i;
+ for(i=0;iread();
+ return outLen;
+}
+
+/*
+ * Callback Response
+ * */
+
+AsyncCallbackResponse::AsyncCallbackResponse(const String& contentType, size_t len, AwsResponseFiller callback, AwsTemplateProcessor templateCallback): AsyncAbstractResponse(templateCallback) {
+ _code = 200;
+ _content = callback;
+ _contentLength = len;
+ if(!len)
+ _sendContentLength = false;
+ _contentType = contentType;
+ _filledLength = 0;
+}
+
+size_t AsyncCallbackResponse::_fillBuffer(uint8_t *data, size_t len){
+ size_t ret = _content(data, len, _filledLength);
+ if(ret != RESPONSE_TRY_AGAIN){
+ _filledLength += ret;
+ }
+ return ret;
+}
+
+/*
+ * Chunked Response
+ * */
+
+AsyncChunkedResponse::AsyncChunkedResponse(const String& contentType, AwsResponseFiller callback, AwsTemplateProcessor processorCallback): AsyncAbstractResponse(processorCallback) {
+ _code = 200;
+ _content = callback;
+ _contentLength = 0;
+ _contentType = contentType;
+ _sendContentLength = false;
+ _chunked = true;
+ _filledLength = 0;
+}
+
+size_t AsyncChunkedResponse::_fillBuffer(uint8_t *data, size_t len){
+ size_t ret = _content(data, len, _filledLength);
+ if(ret != RESPONSE_TRY_AGAIN){
+ _filledLength += ret;
+ }
+ return ret;
+}
+
+/*
+ * Progmem Response
+ * */
+
+AsyncProgmemResponse::AsyncProgmemResponse(int code, const String& contentType, const uint8_t * content, size_t len, AwsTemplateProcessor callback): AsyncAbstractResponse(callback) {
+ _code = code;
+ _content = content;
+ _contentType = contentType;
+ _contentLength = len;
+ _readLength = 0;
+}
+
+size_t AsyncProgmemResponse::_fillBuffer(uint8_t *data, size_t len){
+ size_t left = _contentLength - _readLength;
+ if (left > len) {
+ memcpy_P(data, _content + _readLength, len);
+ _readLength += len;
+ return len;
+ }
+ memcpy_P(data, _content + _readLength, left);
+ _readLength += left;
+ return left;
+}
+
+
+/*
+ * Response Stream (You can print/write/printf to it, up to the contentLen bytes)
+ * */
+
+AsyncResponseStream::AsyncResponseStream(const String& contentType, size_t bufferSize){
+ _code = 200;
+ _contentLength = 0;
+ _contentType = contentType;
+ _content = new cbuf(bufferSize);
+}
+
+AsyncResponseStream::~AsyncResponseStream(){
+ delete _content;
+}
+
+size_t AsyncResponseStream::_fillBuffer(uint8_t *buf, size_t maxLen){
+ return _content->read((char*)buf, maxLen);
+}
+
+size_t AsyncResponseStream::write(const uint8_t *data, size_t len){
+ if(_started())
+ return 0;
+
+ if(len > _content->room()){
+ size_t needed = len - _content->room();
+ _content->resizeAdd(needed);
+ }
+ size_t written = _content->write((const char*)data, len);
+ _contentLength += written;
+ return written;
+}
+
+size_t AsyncResponseStream::write(uint8_t data){
+ return write(&data, 1);
+}
diff --git a/lib/libesp32/ESPAsyncWebServer/src/WebServer.cpp b/lib/libesp32/ESPAsyncWebServer/src/WebServer.cpp
new file mode 100644
index 000000000..3e2b2e40b
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/src/WebServer.cpp
@@ -0,0 +1,193 @@
+/*
+ Asynchronous WebServer library for Espressif MCUs
+
+ Copyright (c) 2016 Hristo Gochkov. All rights reserved.
+ This file is part of the esp8266 core for Arduino environment.
+
+ This library is free software; you can redistribute it and/or
+ modify it under the terms of the GNU Lesser General Public
+ License as published by the Free Software Foundation; either
+ version 2.1 of the License, or (at your option) any later version.
+
+ This library is distributed in the hope that it will be useful,
+ but WITHOUT ANY WARRANTY; without even the implied warranty of
+ MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
+ Lesser General Public License for more details.
+
+ You should have received a copy of the GNU Lesser General Public
+ License along with this library; if not, write to the Free Software
+ Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
+*/
+#include "ESPAsyncWebServer.h"
+#include "WebHandlerImpl.h"
+
+bool ON_STA_FILTER(AsyncWebServerRequest *request) {
+ return WiFi.localIP() == request->client()->localIP();
+}
+
+bool ON_AP_FILTER(AsyncWebServerRequest *request) {
+ return WiFi.localIP() != request->client()->localIP();
+}
+
+
+AsyncWebServer::AsyncWebServer(uint16_t port)
+ : _server(port)
+ , _rewrites(AsyncLinkedList([](AsyncWebRewrite* r){ delete r; }))
+ , _handlers(AsyncLinkedList([](AsyncWebHandler* h){ delete h; }))
+{
+ _catchAllHandler = new AsyncCallbackWebHandler();
+ if(_catchAllHandler == NULL)
+ return;
+ _server.onClient([](void *s, AsyncClient* c){
+ if(c == NULL)
+ return;
+ c->setRxTimeout(3);
+ AsyncWebServerRequest *r = new AsyncWebServerRequest((AsyncWebServer*)s, c);
+ if(r == NULL){
+ c->close(true);
+ c->free();
+ delete c;
+ }
+ }, this);
+}
+
+AsyncWebServer::~AsyncWebServer(){
+ reset();
+ end();
+ if(_catchAllHandler) delete _catchAllHandler;
+}
+
+AsyncWebRewrite& AsyncWebServer::addRewrite(AsyncWebRewrite* rewrite){
+ _rewrites.add(rewrite);
+ return *rewrite;
+}
+
+bool AsyncWebServer::removeRewrite(AsyncWebRewrite *rewrite){
+ return _rewrites.remove(rewrite);
+}
+
+AsyncWebRewrite& AsyncWebServer::rewrite(const char* from, const char* to){
+ return addRewrite(new AsyncWebRewrite(from, to));
+}
+
+AsyncWebHandler& AsyncWebServer::addHandler(AsyncWebHandler* handler){
+ _handlers.add(handler);
+ return *handler;
+}
+
+bool AsyncWebServer::removeHandler(AsyncWebHandler *handler){
+ return _handlers.remove(handler);
+}
+
+void AsyncWebServer::begin(){
+ _server.setNoDelay(true);
+ _server.begin();
+}
+
+void AsyncWebServer::end(){
+ _server.end();
+}
+
+#if ASYNC_TCP_SSL_ENABLED
+void AsyncWebServer::onSslFileRequest(AcSSlFileHandler cb, void* arg){
+ _server.onSslFileRequest(cb, arg);
+}
+
+void AsyncWebServer::beginSecure(const char *cert, const char *key, const char *password){
+ _server.beginSecure(cert, key, password);
+}
+#endif
+
+void AsyncWebServer::_handleDisconnect(AsyncWebServerRequest *request){
+ delete request;
+}
+
+void AsyncWebServer::_rewriteRequest(AsyncWebServerRequest *request){
+ for(const auto& r: _rewrites){
+ if (r->match(request)){
+ request->_url = r->toUrl();
+ request->_addGetParams(r->params());
+ }
+ }
+}
+
+void AsyncWebServer::_attachHandler(AsyncWebServerRequest *request){
+ for(const auto& h: _handlers){
+ if (h->filter(request) && h->canHandle(request)){
+ request->setHandler(h);
+ return;
+ }
+ }
+
+ request->addInterestingHeader("ANY");
+ request->setHandler(_catchAllHandler);
+}
+
+
+AsyncCallbackWebHandler& AsyncWebServer::on(const char* uri, WebRequestMethodComposite method, ArRequestHandlerFunction onRequest, ArUploadHandlerFunction onUpload, ArBodyHandlerFunction onBody){
+ AsyncCallbackWebHandler* handler = new AsyncCallbackWebHandler();
+ handler->setUri(uri);
+ handler->setMethod(method);
+ handler->onRequest(onRequest);
+ handler->onUpload(onUpload);
+ handler->onBody(onBody);
+ addHandler(handler);
+ return *handler;
+}
+
+AsyncCallbackWebHandler& AsyncWebServer::on(const char* uri, WebRequestMethodComposite method, ArRequestHandlerFunction onRequest, ArUploadHandlerFunction onUpload){
+ AsyncCallbackWebHandler* handler = new AsyncCallbackWebHandler();
+ handler->setUri(uri);
+ handler->setMethod(method);
+ handler->onRequest(onRequest);
+ handler->onUpload(onUpload);
+ addHandler(handler);
+ return *handler;
+}
+
+AsyncCallbackWebHandler& AsyncWebServer::on(const char* uri, WebRequestMethodComposite method, ArRequestHandlerFunction onRequest){
+ AsyncCallbackWebHandler* handler = new AsyncCallbackWebHandler();
+ handler->setUri(uri);
+ handler->setMethod(method);
+ handler->onRequest(onRequest);
+ addHandler(handler);
+ return *handler;
+}
+
+AsyncCallbackWebHandler& AsyncWebServer::on(const char* uri, ArRequestHandlerFunction onRequest){
+ AsyncCallbackWebHandler* handler = new AsyncCallbackWebHandler();
+ handler->setUri(uri);
+ handler->onRequest(onRequest);
+ addHandler(handler);
+ return *handler;
+}
+
+AsyncStaticWebHandler& AsyncWebServer::serveStatic(const char* uri, fs::FS& fs, const char* path, const char* cache_control){
+ AsyncStaticWebHandler* handler = new AsyncStaticWebHandler(uri, fs, path, cache_control);
+ addHandler(handler);
+ return *handler;
+}
+
+void AsyncWebServer::onNotFound(ArRequestHandlerFunction fn){
+ _catchAllHandler->onRequest(fn);
+}
+
+void AsyncWebServer::onFileUpload(ArUploadHandlerFunction fn){
+ _catchAllHandler->onUpload(fn);
+}
+
+void AsyncWebServer::onRequestBody(ArBodyHandlerFunction fn){
+ _catchAllHandler->onBody(fn);
+}
+
+void AsyncWebServer::reset(){
+ _rewrites.free();
+ _handlers.free();
+
+ if (_catchAllHandler != NULL){
+ _catchAllHandler->onRequest(NULL);
+ _catchAllHandler->onUpload(NULL);
+ _catchAllHandler->onBody(NULL);
+ }
+}
+
diff --git a/lib/libesp32/ESPAsyncWebServer/src/edit.htm b/lib/libesp32/ESPAsyncWebServer/src/edit.htm
new file mode 100644
index 000000000..43d498455
--- /dev/null
+++ b/lib/libesp32/ESPAsyncWebServer/src/edit.htm
@@ -0,0 +1,627 @@
+
+
+
+
+ESP Editor
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/lib/libesp32/gpio_viewer/.gitignore b/lib/libesp32/gpio_viewer/.gitignore
new file mode 100644
index 000000000..7f059b39f
--- /dev/null
+++ b/lib/libesp32/gpio_viewer/.gitignore
@@ -0,0 +1,4 @@
+build
+sounds
+secrets.h
+.vscode
\ No newline at end of file
diff --git a/lib/libesp32/gpio_viewer/LICENSE b/lib/libesp32/gpio_viewer/LICENSE
new file mode 100644
index 000000000..c868c9b62
--- /dev/null
+++ b/lib/libesp32/gpio_viewer/LICENSE
@@ -0,0 +1,21 @@
+MIT License
+
+Copyright (c) 2023 thelastoutpostworkshop
+
+Permission is hereby granted, free of charge, to any person obtaining a copy
+of this software and associated documentation files (the "Software"), to deal
+in the Software without restriction, including without limitation the rights
+to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
+copies of the Software, and to permit persons to whom the Software is
+furnished to do so, subject to the following conditions:
+
+The above copyright notice and this permission notice shall be included in all
+copies or substantial portions of the Software.
+
+THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
+IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
+FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
+AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
+LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
+OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
+SOFTWARE.
diff --git a/lib/libesp32/gpio_viewer/README.md b/lib/libesp32/gpio_viewer/README.md
new file mode 100644
index 000000000..b7291510a
--- /dev/null
+++ b/lib/libesp32/gpio_viewer/README.md
@@ -0,0 +1,94 @@
+# GPIOViewer Arduino Library to see live GPIO Pins on ESP32 boards
+
+**Transforms the way you troubleshoot your microcontroller projects**.
+
+### Youtube Tutorial
+[ ](https://youtu.be/UxkOosaNohU)
+
+### Installation Arduino IDE (Version 2)
+>ℹ️ Make sure you have the latest ESP32 boards by Espressif Systems in your Board Manager
](https://youtu.be/UxkOosaNohU)
+
+### Installation Arduino IDE (Version 2)
+>ℹ️ Make sure you have the latest ESP32 boards by Espressif Systems in your Board Manager
+
+- Install the **GPIOViewer Library with the Arduino IDE Library Manager** or Download the [latest release](https://github.com/thelastoutpostworkshop/gpio_viewer/releases/latest) and install the library in the Arduino IDE : `Sketch > Include Library > Add ZIP Library...`
+- Download [ESPAsyncWebServer](https://github.com/me-no-dev/ESPAsyncWebServer) and install the library in the Arduino IDE `Sketch > Include Library > Add ZIP Library...`
+- Install the the [AsyncTCP](https://github.com/dvarrel/AsyncTCP) using the Arduino IDE Library Manager.
+
+### Installation VSCode + PlatformIO
+
+Add the following to your platformio.ini file:
+
+```
+lib_deps =
+ https://github.com/dvarrel/AsyncTCP.git
+ https://github.com/me-no-dev/ESPAsyncWebServer.git
+ https://github.com/thelastoutpostworkshop/gpio_viewer.git
+```
+
+### Usage
+>ℹ️ You can also use get examples provided with the library in the Arduino IDE through the menu `File > Examples > GPIOViewer`
+>ℹ️ You only need to include the library, declare the GPIOViewer and call begin() at the end of your setup, and that's it!
+>ℹ️ The URL to the web GPIO viewer application is printed on the serial monitor
+```c
+#include // Must me the first include in your project
+GPIOViewer gpio_viewer;
+
+void setup()
+{
+ Serial.begin(115200);
+
+ // Comment the next line, If your code aleady include connection to Wifi
+ gpio_viewer.connectToWifi("Your SSID network", "Your WiFi Password");
+ // gpio_viewer.setPort(5555); // You can set the http port, if not set default port is 8080
+
+ // Your own setup code start here
+
+ // Must be at the end of your setup
+ // gpio_viewer.setSamplingInterval(25); // You can set the sampling interval in ms, if not set default is 100ms
+ gpio_viewer.begin();
+}
+```
+>ℹ️ The default HTTP port is **8080** and default sampling interval is **100ms**.
+
+### GPIO Supported
+
+- Digital
+- Analog
+- PWM
+
+### Library Size
+
+- The GPIOViewer Library adds 50 KB to your projects.
+- No worries! All the assets (ex. board images) of the web application are loaded from github pages and don't add to the size of your projects.
+
+### Performance
+- Ensure you have a strong Wifi signal with a good transfer rate. 25ms sampling interval works great on Wifi 6 with 125 Mbps.
+- If you get "ERROR: Too many messages queued" on the Serial Monitor, this means the data is not read fast enough by the web application. The data will still be displayed, but with some latency. Reduce the sampling interval or try to improve your Wifi performance.
+
+### ESP32 Boards Supported
+>ℹ️ You can use the "Generic View" in the GPIO Web Application to see GPIO pin activites live even if your board image is not listed
+>ℹ️ You can also request an ESP32 board image addition by [creating a new issue](https://github.com/thelastoutpostworkshop/gpio_viewer/issues).
+
+
+| Description | Image | Pinout |
+|--------------------|-------------------------------------|-------------------------------------|
+| ESP32 VROOM 32D (38 pins) | !  |
| 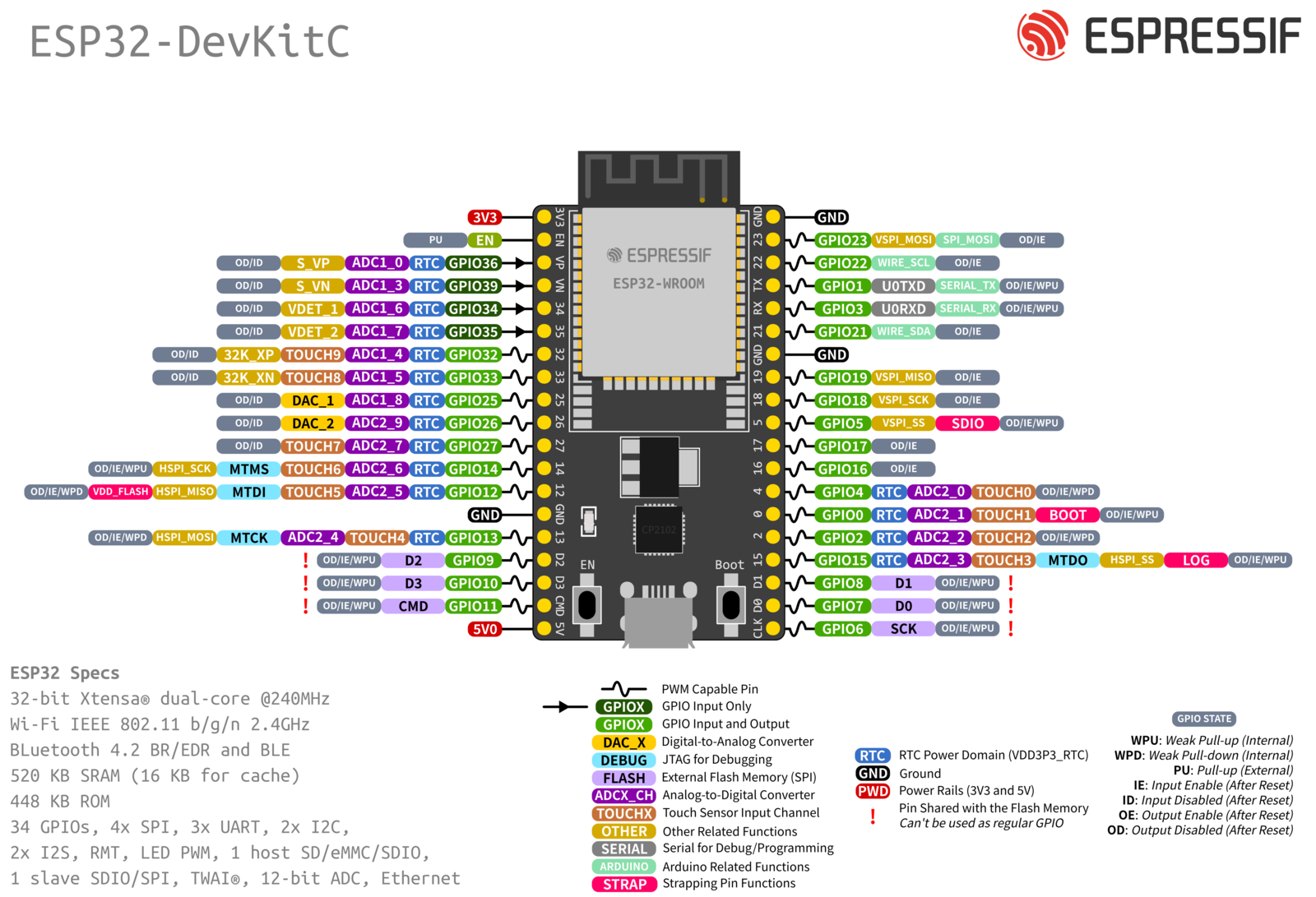 |
+| ESP32 VROOM 32D (30 pins) | !
|
+| ESP32 VROOM 32D (30 pins) | !  |
|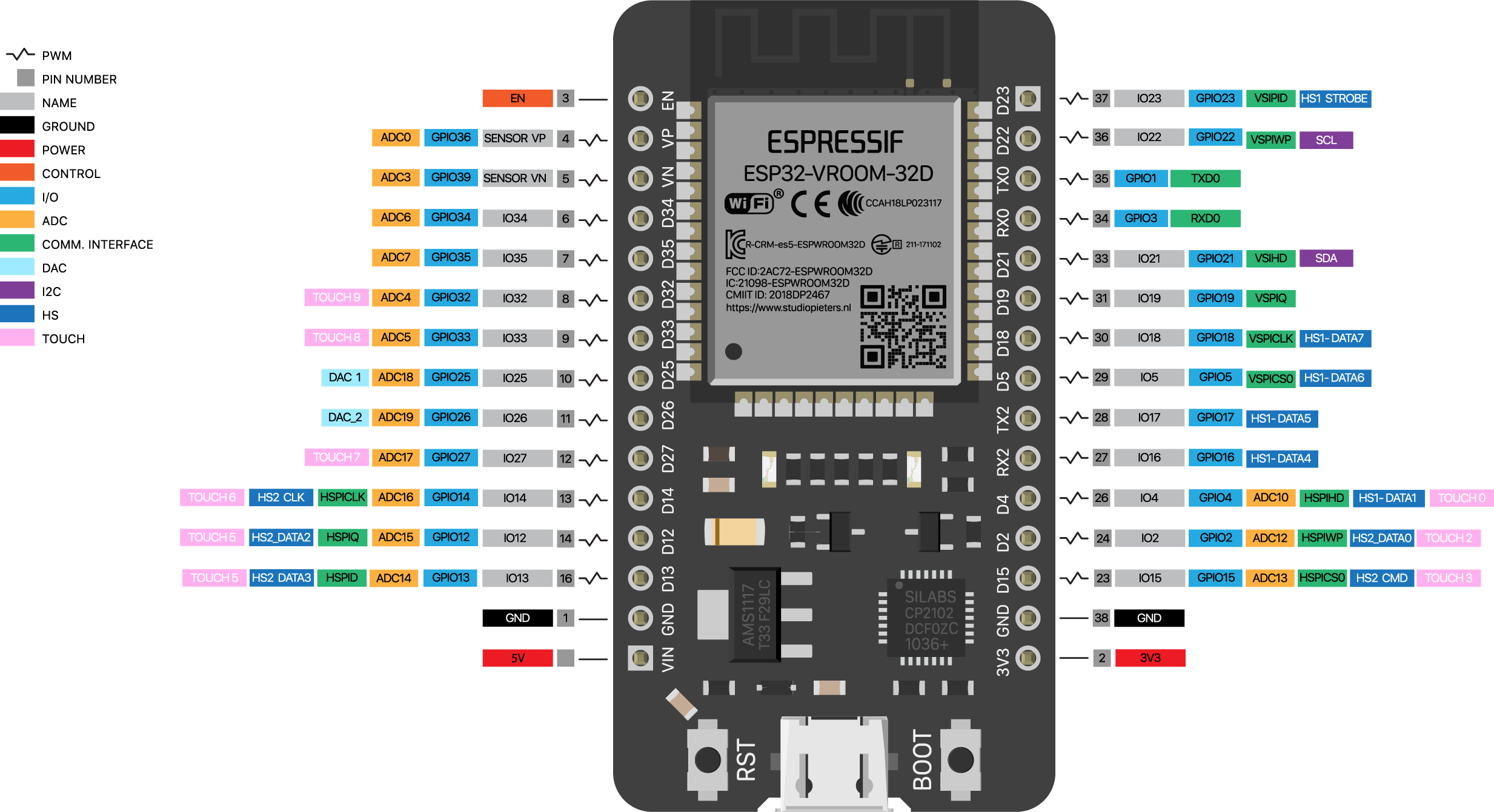 |
+| ESP32 D1 R32 | !
|
+| ESP32 D1 R32 | !  |
|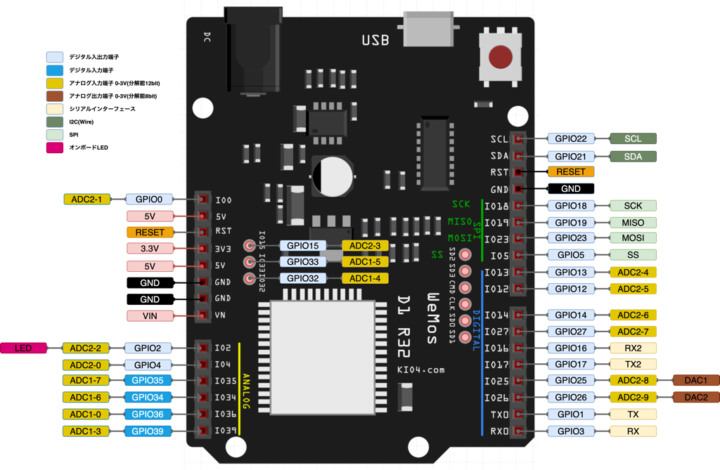 |
+| ESP32 C3 Wroom-02 | !
|
+| ESP32 C3 Wroom-02 | !  |
| |
+| ESP32 Wroom-32UE | !
|
+| ESP32 Wroom-32UE | !  |
|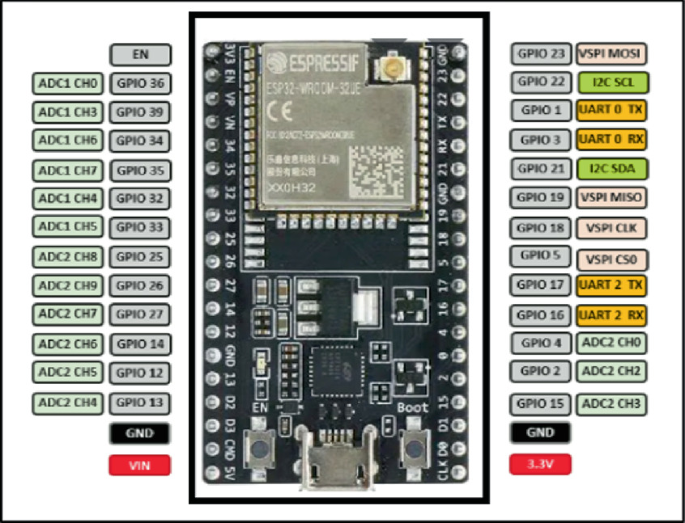 |
+| ESP32 EVB | !
|
+| ESP32 EVB | !  |
| |
+| ESP32 S3 Wroom-1 | !
|
+| ESP32 S3 Wroom-1 | !  |
|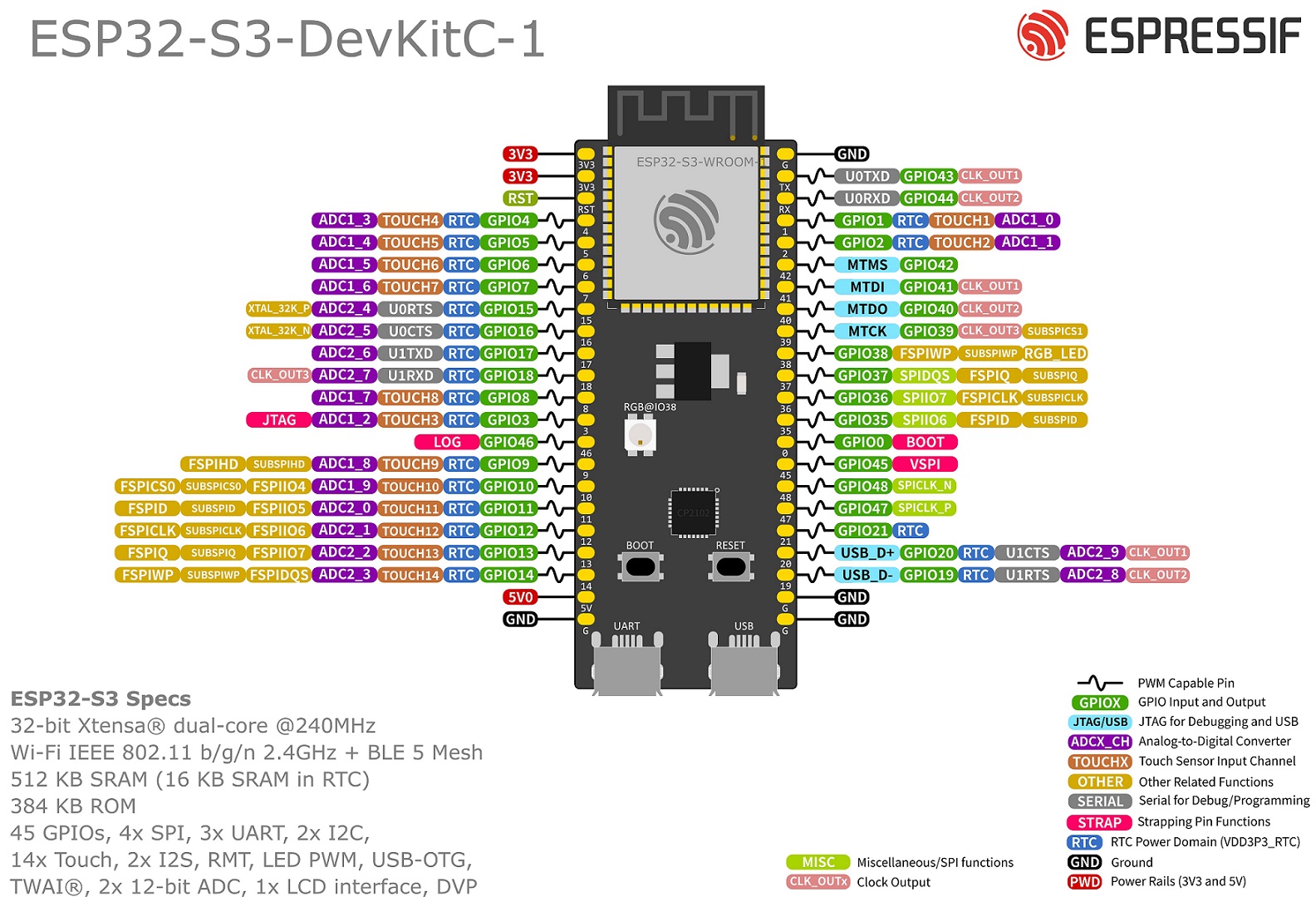 |
+| Esp32 S2 Mini V1.0.0 | !
|
+| Esp32 S2 Mini V1.0.0 | !  |
|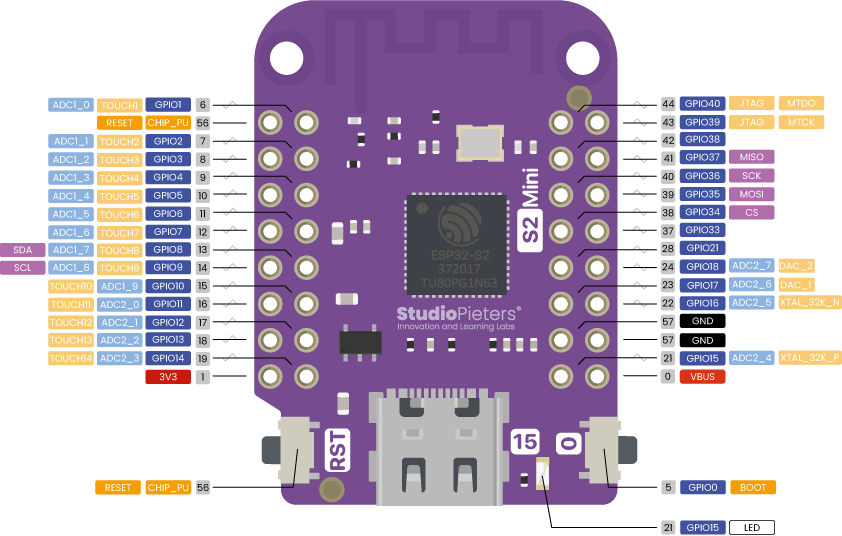 |
+| ESP32 POE | !
|
+| ESP32 POE | !  |
|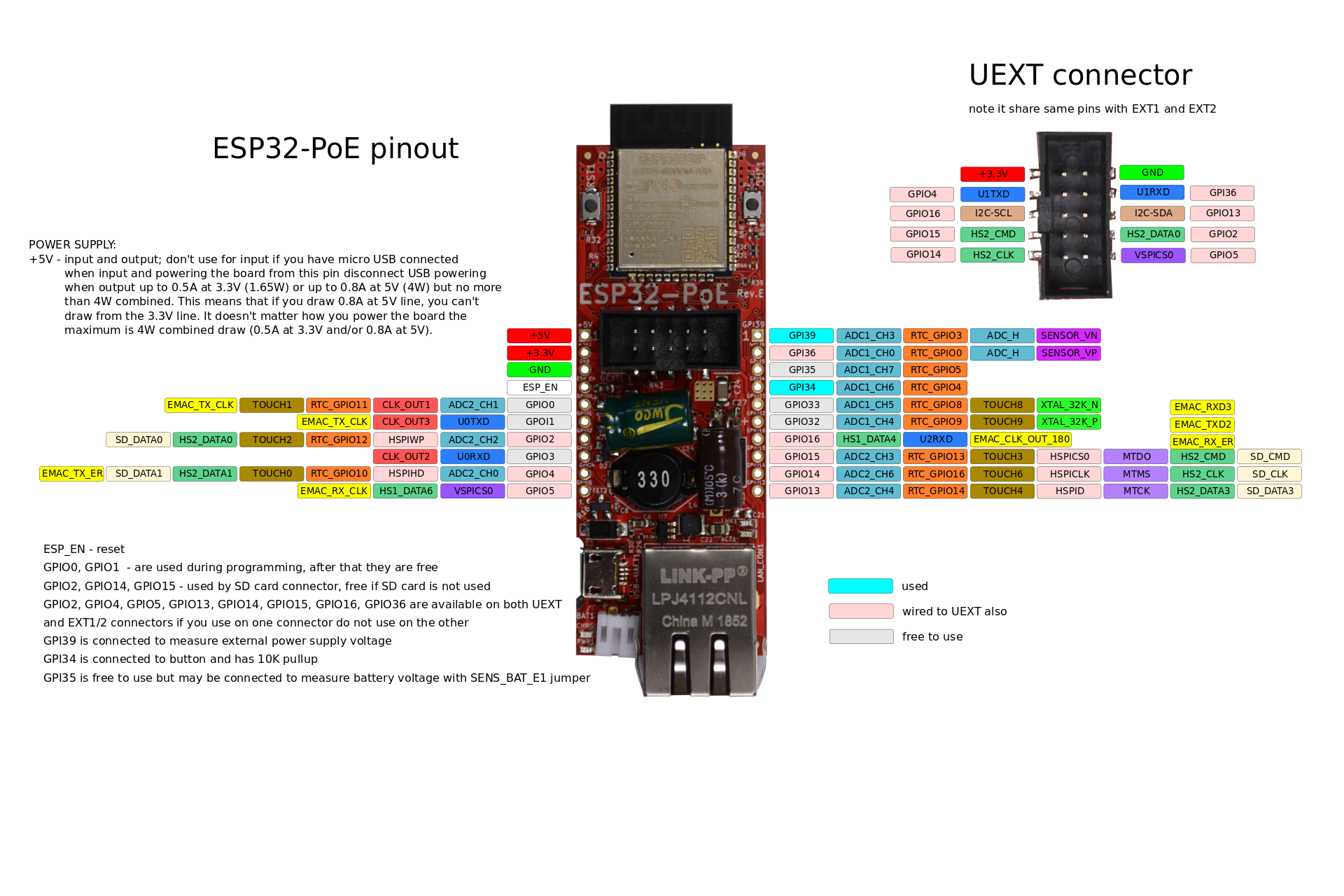 |
+| ESP32 C3 Mini | !
|
+| ESP32 C3 Mini | !  |
| |
+| ESP32 Pico Kit v4.1 | !
|
+| ESP32 Pico Kit v4.1 | !  |
|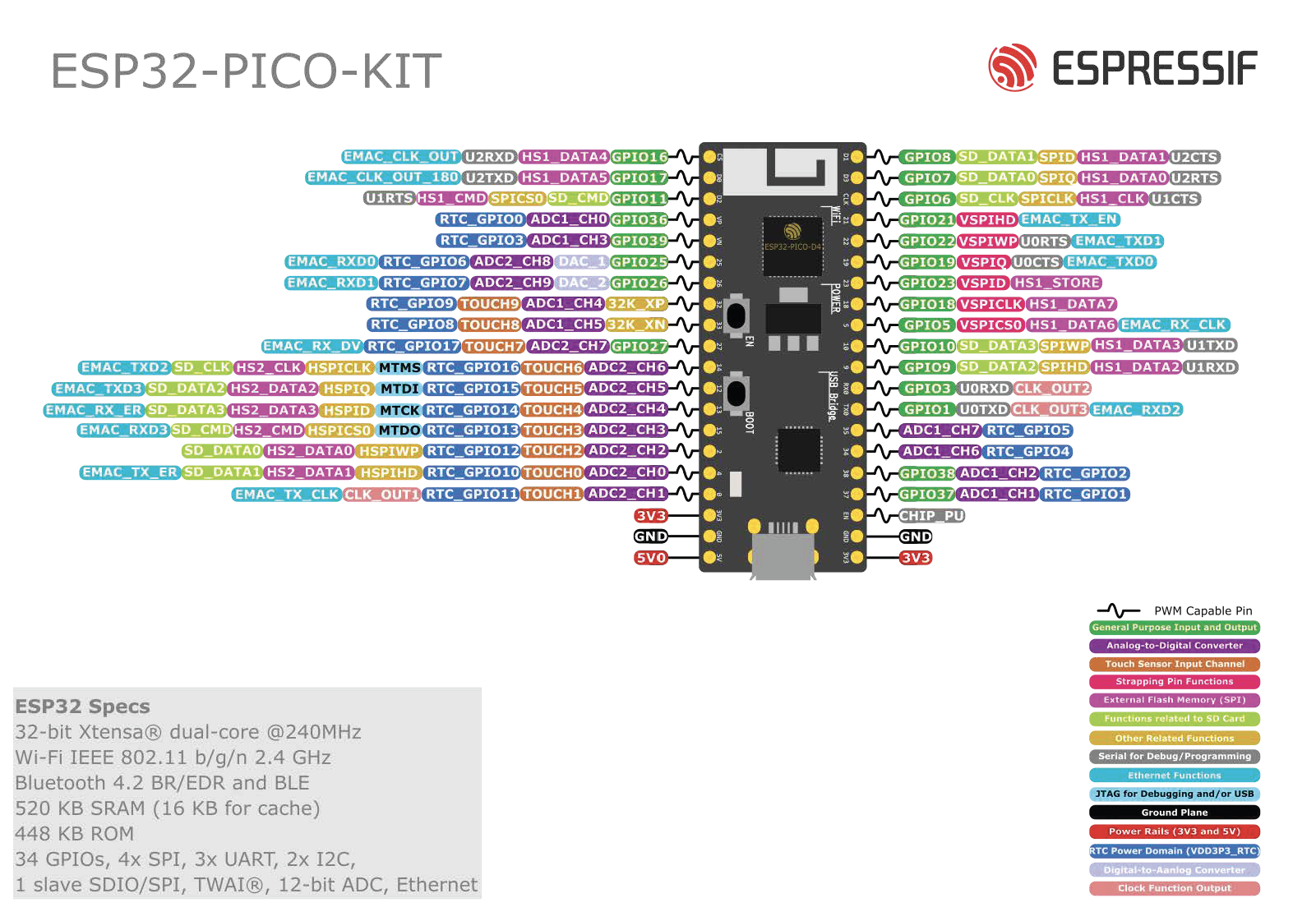 |
+| Lilygo T7 Mini32 v1.5 | !
|
+| Lilygo T7 Mini32 v1.5 | !  |
| |
+| Freenove ESP32-S3 | !
|
+| Freenove ESP32-S3 | !  |
|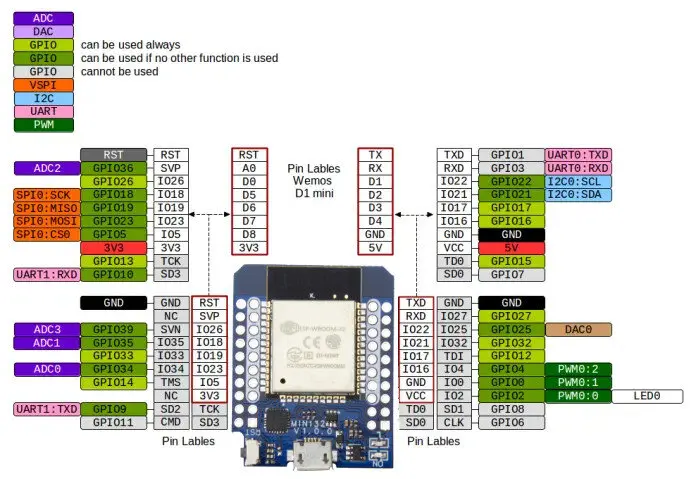 |
+| Nano ESP32 | !
|
+| Nano ESP32 | !  |
|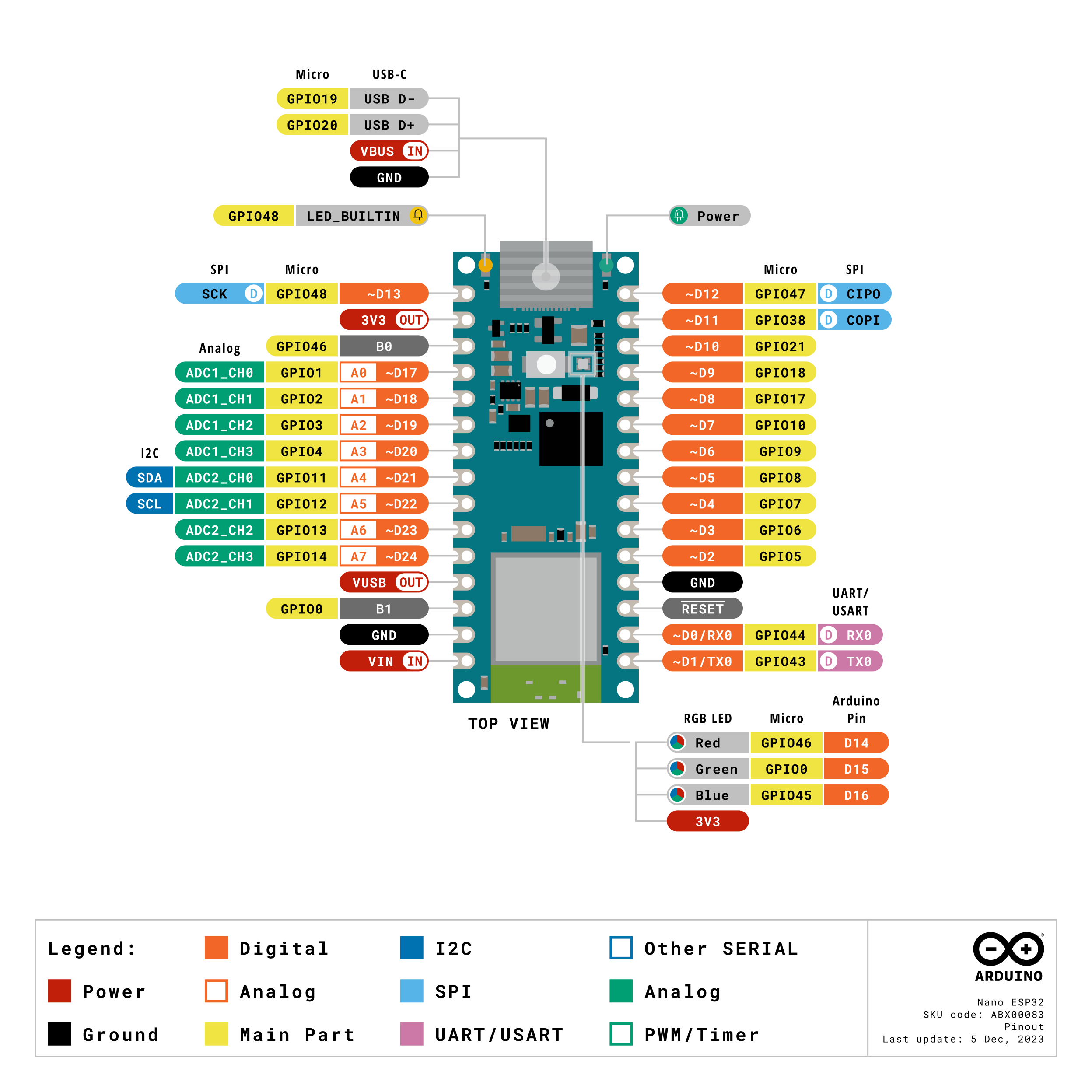 |
+| StickLite-V3-ESP32S3 | !
|
+| StickLite-V3-ESP32S3 | !  |
|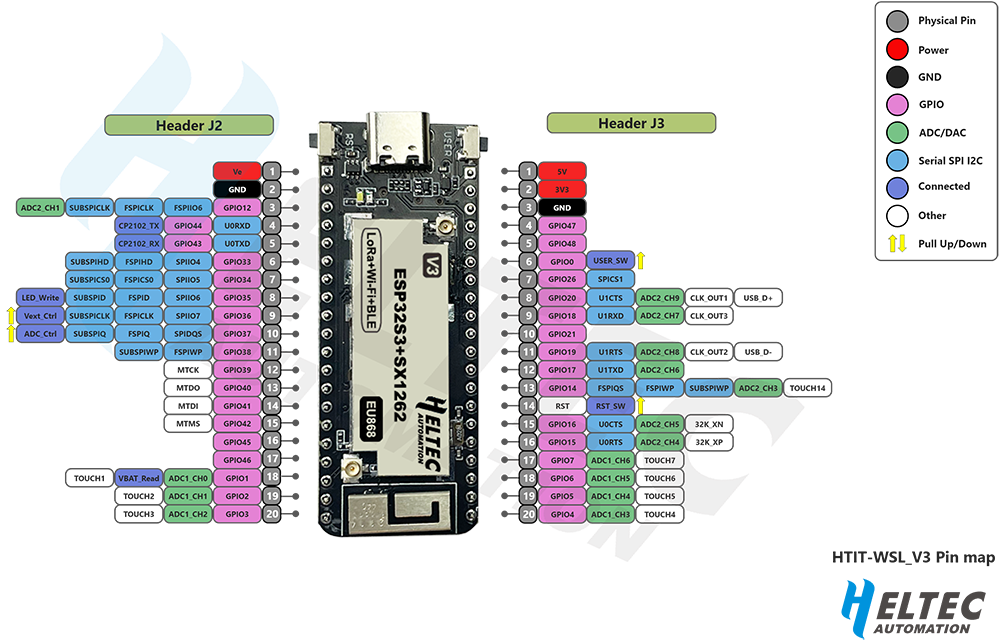 |
+| XIAO-ESP32-C3 | !
|
+| XIAO-ESP32-C3 | !  |
|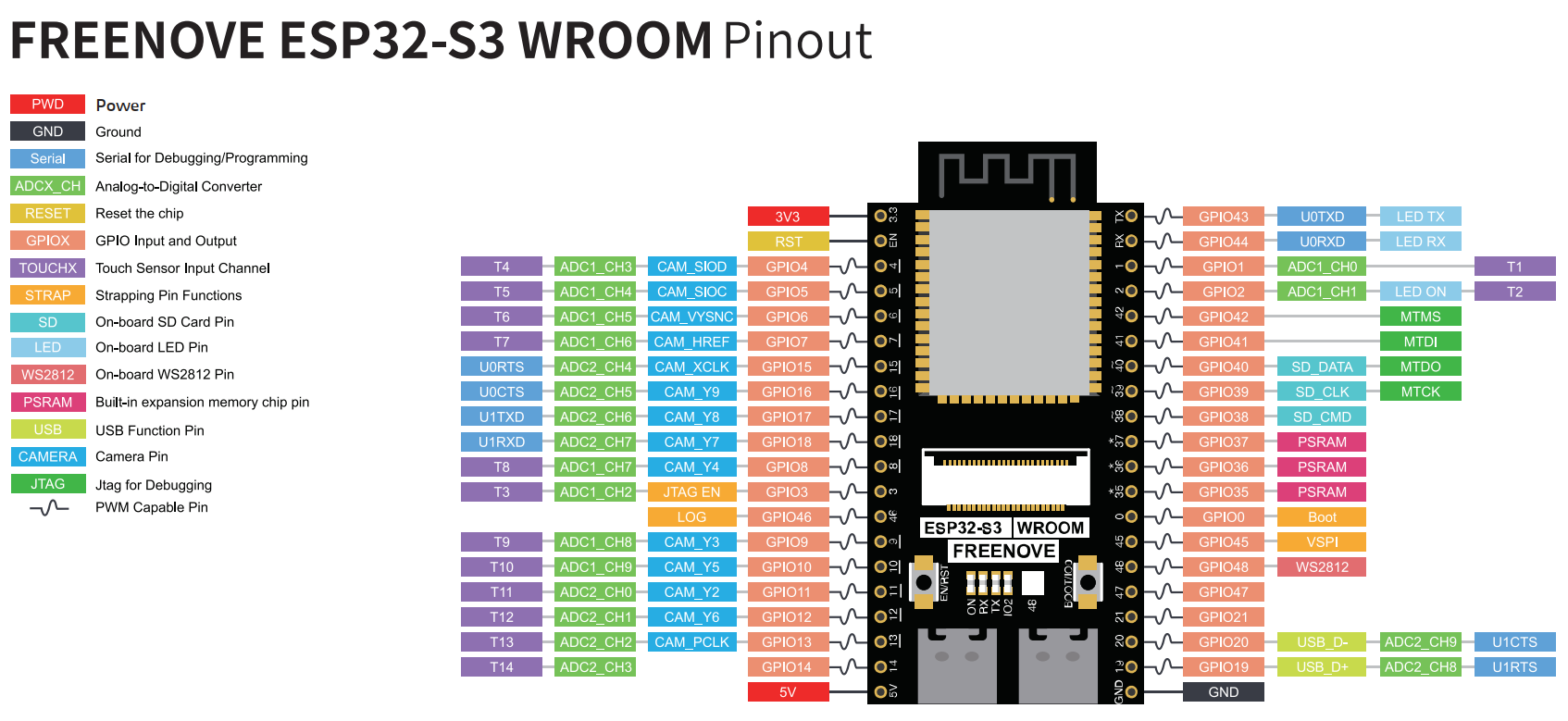 |
+| T-Display S3 AMOLED | !
|
+| T-Display S3 AMOLED | !  |
|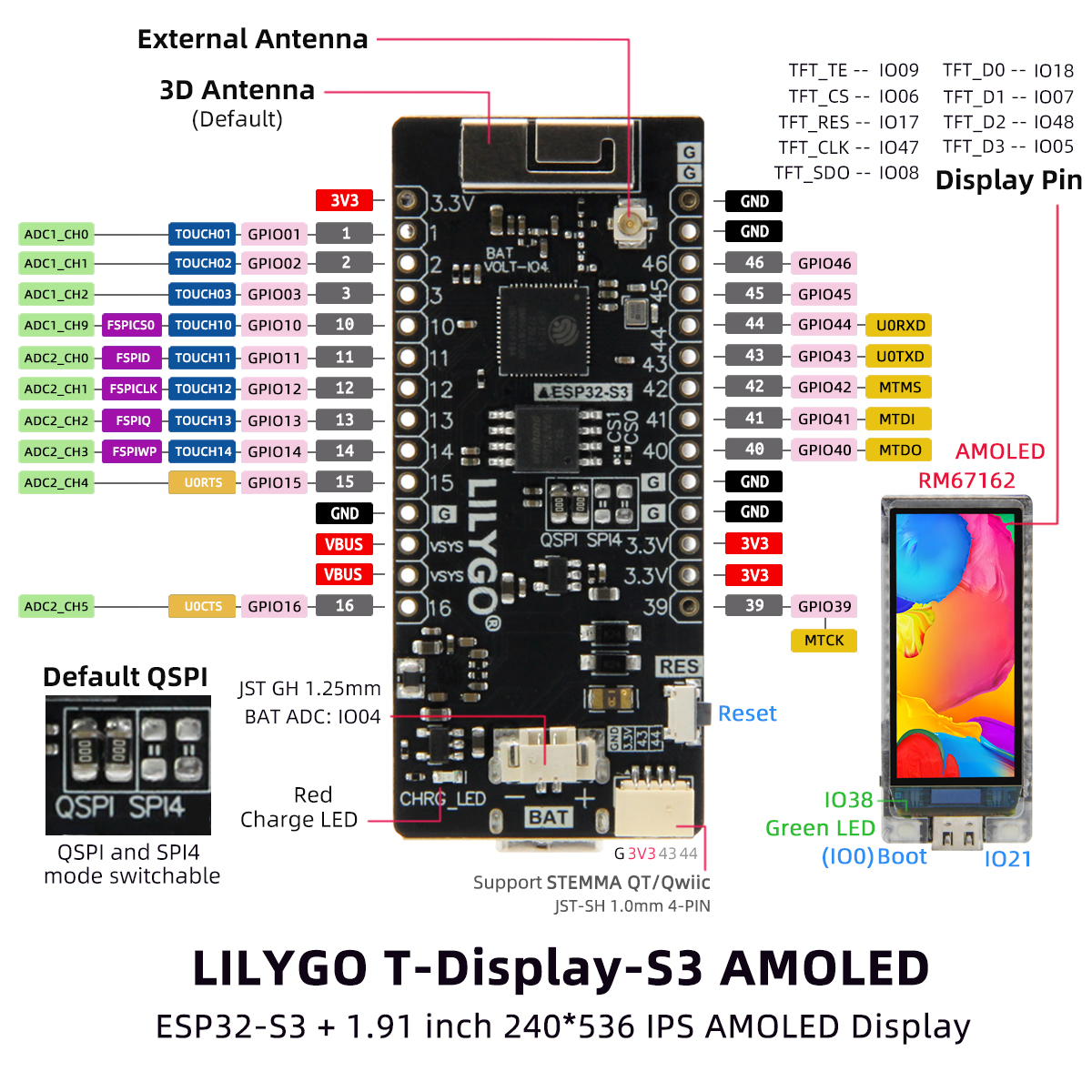 |
+| TinyPICO Nano | !
|
+| TinyPICO Nano | !  |
|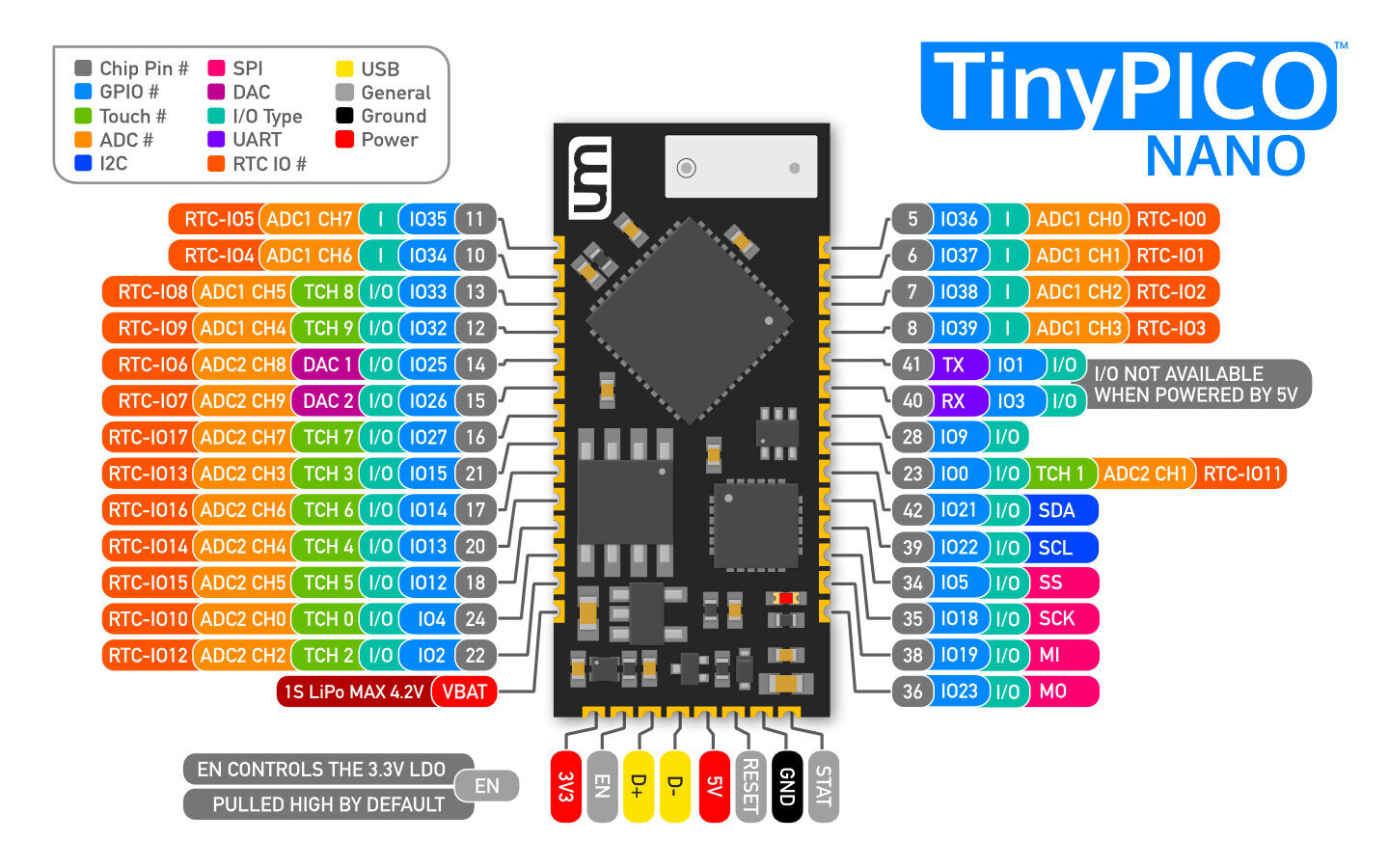 |
+| TinyPico V3 | !
|
+| TinyPico V3 | !  |
| |
+| Wemos Lolin32 Lite V1 | !
|
+| Wemos Lolin32 Lite V1 | !  |
|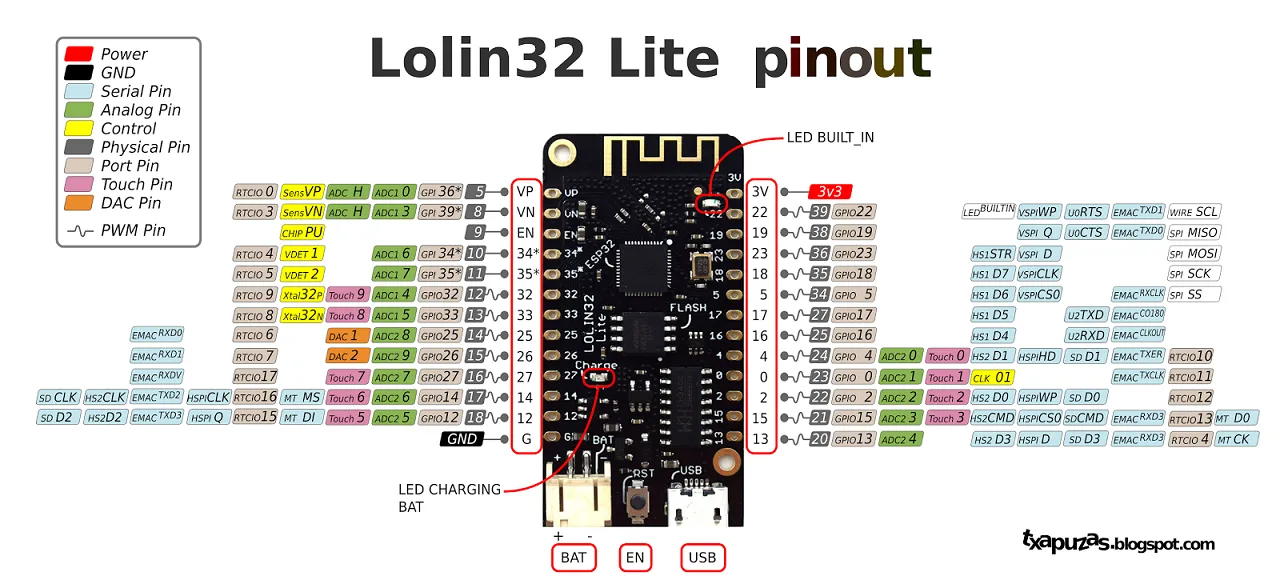 |
+| Wemos D1 Mini ESP32 | !
|
+| Wemos D1 Mini ESP32 | !  ||
+| XIAO-ESP32-C3 | ! |
||
+| XIAO-ESP32-C3 | ! |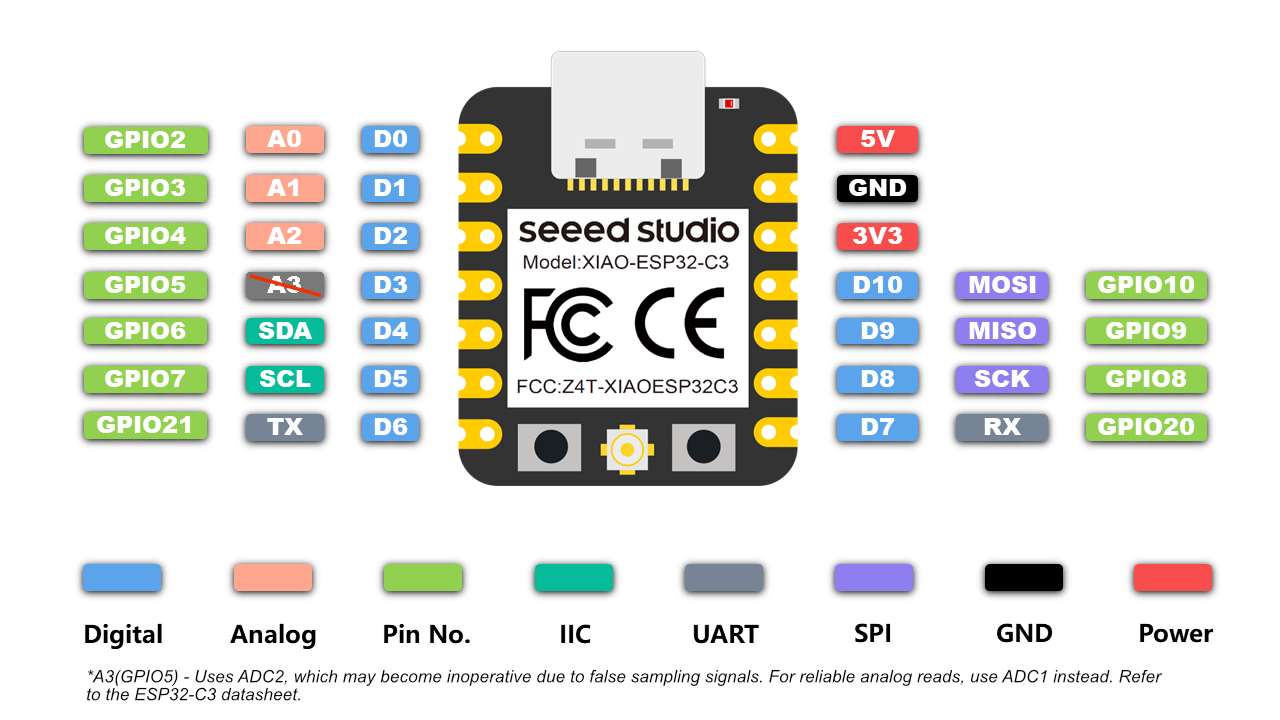 |
diff --git a/lib/libesp32/gpio_viewer/examples/gpioviewer/gpioviewer.ino b/lib/libesp32/gpio_viewer/examples/gpioviewer/gpioviewer.ino
new file mode 100644
index 000000000..66def80f3
--- /dev/null
+++ b/lib/libesp32/gpio_viewer/examples/gpioviewer/gpioviewer.ino
@@ -0,0 +1,30 @@
+/***
+This example is intended to demonstrate the use of the GPIO Viewer Library.
+
+Tutorial : https://youtu.be/UxkOosaNohU
+Documentation : https://github.com/thelastoutpostworkshop/gpio_viewer
+***/
+
+#include // Must me the first include in your project
+GPIOViewer gpio_viewer;
+
+void setup()
+{
+ Serial.begin(115200);
+
+ // Comment the next line, If your code aleady include connection to Wifi
+ gpio_viewer.connectToWifi("Your SSID network", "Your WiFi Password");
+ // gpio_viewer.setPort(5555); // You can set the http port, if not set default port is 8080
+
+ // Your own setup code start here
+
+ // Must be at the end of your setup
+ // gpio_viewer.setSamplingInterval(25); // You can set the sampling interval in ms, if not set default is 100ms
+ gpio_viewer.begin();
+}
+
+// You don't need to change your loop function
+void loop() {
+
+}
+// The rest of your code here
\ No newline at end of file
diff --git a/lib/libesp32/gpio_viewer/gpio_viewer.ino b/lib/libesp32/gpio_viewer/gpio_viewer.ino
new file mode 100644
index 000000000..24386c2d3
--- /dev/null
+++ b/lib/libesp32/gpio_viewer/gpio_viewer.ino
@@ -0,0 +1,149 @@
+#include "src/gpio_viewer.h"
+#include
+#include // Install this library with the Arduino IDE Library Manager
+#include "secrets.h"
+
+GPIOViewer gpio_viewer;
+
+#define ROTARY_PIN_A 23
+#define ROTARY_PIN_B 22
+#define ROTARY_PUSH_BUTTON 22 // Not used
+SimpleRotary rotary(ROTARY_PIN_A, ROTARY_PIN_B, ROTARY_PUSH_BUTTON);
+
+int test_digital_pins[] = {33, 25, 26};
+const int testDigitalPinsCount = sizeof(test_digital_pins) / sizeof(test_digital_pins[0]);
+int currentLed = 0; // Start with the first LED
+
+const int analogPinsCount = 3;
+int test_analog_pins[analogPinsCount] = {32, 19, 18};
+int analogValue = 0;
+
+const int freq = 200;
+const int resolution = 16;
+
+struct PWM_PINS
+{
+ int pin;
+ int channel;
+ uint16_t level;
+};
+
+PWM_PINS test_pwm_pins[] = {{15, 0}, {2, 1}, {0, 2}, {4, 3}};
+const int testPWMPinsCount = sizeof(test_pwm_pins) / sizeof(test_pwm_pins[0]);
+
+void setup()
+{
+ Serial.begin(115200);
+
+ gpio_viewer.connectToWifi(ssid, password); // If your code aleady include connection to Wifi, you can comment this line
+ // gpio_viewer.setPort(5555); // You can set the http port, if not set default port is 8080
+
+ // Example - Your own setup code start here
+ test1_setup();
+
+ // Must be at the end of your setup
+ gpio_viewer.setSamplingInterval(75); // You can set the sampling interval in ms, if not set, default is 100ms
+ gpio_viewer.begin();
+}
+
+void loop()
+{
+ test1_loop();
+}
+
+void test1_setup()
+{
+ uint16_t amount = 0;
+ for (int i = 0; i < testPWMPinsCount; i++)
+ {
+ amount += (65535 / testPWMPinsCount);
+ ledcSetup(test_pwm_pins[i].channel, freq, resolution);
+ ledcAttachPin(test_pwm_pins[i].pin, test_pwm_pins[i].channel);
+ test_pwm_pins[i].level = amount;
+ }
+ for (int i = 0; i < testDigitalPinsCount; i++)
+ {
+ pinMode(test_digital_pins[i], OUTPUT);
+ digitalWrite(test_digital_pins[i], LOW);
+ }
+ for (int i = 0; i < analogPinsCount; i++)
+ {
+ pinMode(test_analog_pins[i], OUTPUT);
+ }
+ xTaskCreate(readRotaryEncoderTask, // Task function
+ "ReadRotaryEncoder", // Name of the task (for debugging)
+ 2048, // Stack size (bytes)
+ NULL, // Parameter to pass to the function
+ 1, // Task priority
+ NULL);
+}
+void test1_loop()
+{
+ for (int i = 0; i < analogPinsCount; i++)
+ {
+ analogValue += (i * 3);
+ analogWrite(test_analog_pins[i], analogValue++);
+ }
+ for (int i = 0; i < testPWMPinsCount; i++)
+ {
+ ledcWrite(test_pwm_pins[i].channel, test_pwm_pins[i].level);
+ delay(150);
+ }
+ delay(300);
+ for (int i = 0; i < testPWMPinsCount; i++)
+ {
+ ledcWrite(test_pwm_pins[i].channel, test_pwm_pins[i].level / 2);
+ delay(150);
+ }
+ for (int i = 0; i < testDigitalPinsCount; i++)
+ {
+ if (digitalRead(test_digital_pins[i]) == LOW)
+ {
+
+ digitalWrite(test_digital_pins[i], HIGH);
+ }
+ else
+ {
+
+ digitalWrite(test_digital_pins[i], LOW);
+ }
+ }
+ delay(300);
+}
+
+void updateLeds()
+{
+ for (int i = 0; i < testDigitalPinsCount; i++)
+ {
+ digitalWrite(test_digital_pins[i], i == currentLed ? HIGH : LOW);
+ }
+}
+
+void readRotaryEncoderTask(void *pvParameters)
+{
+ for (;;)
+ { // Infinite loop
+ readRotaryEncoder();
+ vTaskDelay(pdMS_TO_TICKS(10)); // Delay for debouncing, adjust as needed
+ }
+}
+
+void readRotaryEncoder(void)
+{
+ byte i;
+ i = rotary.rotate();
+
+ if (i == 1)
+ {
+ currentLed = (currentLed - 1 + testDigitalPinsCount) % testDigitalPinsCount;
+ updateLeds();
+ Serial.println("CounterClockwise");
+ }
+
+ if (i == 2)
+ {
+ currentLed = (currentLed + 1) % testDigitalPinsCount;
+ updateLeds();
+ Serial.println("Clockwise");
+ }
+}
diff --git a/lib/libesp32/gpio_viewer/keywords.txt b/lib/libesp32/gpio_viewer/keywords.txt
new file mode 100644
index 000000000..17719d72c
--- /dev/null
+++ b/lib/libesp32/gpio_viewer/keywords.txt
@@ -0,0 +1,16 @@
+[Keywords]
+#######################################
+# Datatypes (KEYWORD1)
+#######################################
+byte
+boolean
+uint16_t
+int16_t
+int
+enum
+
+#######################################
+# Methods and Functions (KEYWORD2)
+#######################################
+begin
+
diff --git a/lib/libesp32/gpio_viewer/library.properties b/lib/libesp32/gpio_viewer/library.properties
new file mode 100644
index 000000000..c65ff1276
--- /dev/null
+++ b/lib/libesp32/gpio_viewer/library.properties
@@ -0,0 +1,11 @@
+name=GPIOViewer
+version=1.0.4
+author=The Last Outpost Workshop
+maintainer=The Last Outpost Workshop
+sentence=Web Application to view GPIO pins live!
+paragraph=Works ESP32
+category=Other
+keywords=keywords.txt
+url=https://github.com/thelastoutpostworkshop/gpio_viewer
+architectures=esp32
+depends=AsyncTCP
\ No newline at end of file
diff --git a/lib/libesp32/gpio_viewer/src/gpio_viewer.h b/lib/libesp32/gpio_viewer/src/gpio_viewer.h
new file mode 100644
index 000000000..6a4f1a58d
--- /dev/null
+++ b/lib/libesp32/gpio_viewer/src/gpio_viewer.h
@@ -0,0 +1,360 @@
+#ifndef _GPIOVIEWER_
+#define _GPIOVIEWER_
+#ifndef WEBSERVER_H
+// Compatiblity with the Wifi Manager if your using it in your project
+#include
+#endif
+#ifndef WiFi_h
+#include
+#endif
+#ifndef _ESPAsyncWebServer_H_
+#include
|
diff --git a/lib/libesp32/gpio_viewer/examples/gpioviewer/gpioviewer.ino b/lib/libesp32/gpio_viewer/examples/gpioviewer/gpioviewer.ino
new file mode 100644
index 000000000..66def80f3
--- /dev/null
+++ b/lib/libesp32/gpio_viewer/examples/gpioviewer/gpioviewer.ino
@@ -0,0 +1,30 @@
+/***
+This example is intended to demonstrate the use of the GPIO Viewer Library.
+
+Tutorial : https://youtu.be/UxkOosaNohU
+Documentation : https://github.com/thelastoutpostworkshop/gpio_viewer
+***/
+
+#include // Must me the first include in your project
+GPIOViewer gpio_viewer;
+
+void setup()
+{
+ Serial.begin(115200);
+
+ // Comment the next line, If your code aleady include connection to Wifi
+ gpio_viewer.connectToWifi("Your SSID network", "Your WiFi Password");
+ // gpio_viewer.setPort(5555); // You can set the http port, if not set default port is 8080
+
+ // Your own setup code start here
+
+ // Must be at the end of your setup
+ // gpio_viewer.setSamplingInterval(25); // You can set the sampling interval in ms, if not set default is 100ms
+ gpio_viewer.begin();
+}
+
+// You don't need to change your loop function
+void loop() {
+
+}
+// The rest of your code here
\ No newline at end of file
diff --git a/lib/libesp32/gpio_viewer/gpio_viewer.ino b/lib/libesp32/gpio_viewer/gpio_viewer.ino
new file mode 100644
index 000000000..24386c2d3
--- /dev/null
+++ b/lib/libesp32/gpio_viewer/gpio_viewer.ino
@@ -0,0 +1,149 @@
+#include "src/gpio_viewer.h"
+#include
+#include // Install this library with the Arduino IDE Library Manager
+#include "secrets.h"
+
+GPIOViewer gpio_viewer;
+
+#define ROTARY_PIN_A 23
+#define ROTARY_PIN_B 22
+#define ROTARY_PUSH_BUTTON 22 // Not used
+SimpleRotary rotary(ROTARY_PIN_A, ROTARY_PIN_B, ROTARY_PUSH_BUTTON);
+
+int test_digital_pins[] = {33, 25, 26};
+const int testDigitalPinsCount = sizeof(test_digital_pins) / sizeof(test_digital_pins[0]);
+int currentLed = 0; // Start with the first LED
+
+const int analogPinsCount = 3;
+int test_analog_pins[analogPinsCount] = {32, 19, 18};
+int analogValue = 0;
+
+const int freq = 200;
+const int resolution = 16;
+
+struct PWM_PINS
+{
+ int pin;
+ int channel;
+ uint16_t level;
+};
+
+PWM_PINS test_pwm_pins[] = {{15, 0}, {2, 1}, {0, 2}, {4, 3}};
+const int testPWMPinsCount = sizeof(test_pwm_pins) / sizeof(test_pwm_pins[0]);
+
+void setup()
+{
+ Serial.begin(115200);
+
+ gpio_viewer.connectToWifi(ssid, password); // If your code aleady include connection to Wifi, you can comment this line
+ // gpio_viewer.setPort(5555); // You can set the http port, if not set default port is 8080
+
+ // Example - Your own setup code start here
+ test1_setup();
+
+ // Must be at the end of your setup
+ gpio_viewer.setSamplingInterval(75); // You can set the sampling interval in ms, if not set, default is 100ms
+ gpio_viewer.begin();
+}
+
+void loop()
+{
+ test1_loop();
+}
+
+void test1_setup()
+{
+ uint16_t amount = 0;
+ for (int i = 0; i < testPWMPinsCount; i++)
+ {
+ amount += (65535 / testPWMPinsCount);
+ ledcSetup(test_pwm_pins[i].channel, freq, resolution);
+ ledcAttachPin(test_pwm_pins[i].pin, test_pwm_pins[i].channel);
+ test_pwm_pins[i].level = amount;
+ }
+ for (int i = 0; i < testDigitalPinsCount; i++)
+ {
+ pinMode(test_digital_pins[i], OUTPUT);
+ digitalWrite(test_digital_pins[i], LOW);
+ }
+ for (int i = 0; i < analogPinsCount; i++)
+ {
+ pinMode(test_analog_pins[i], OUTPUT);
+ }
+ xTaskCreate(readRotaryEncoderTask, // Task function
+ "ReadRotaryEncoder", // Name of the task (for debugging)
+ 2048, // Stack size (bytes)
+ NULL, // Parameter to pass to the function
+ 1, // Task priority
+ NULL);
+}
+void test1_loop()
+{
+ for (int i = 0; i < analogPinsCount; i++)
+ {
+ analogValue += (i * 3);
+ analogWrite(test_analog_pins[i], analogValue++);
+ }
+ for (int i = 0; i < testPWMPinsCount; i++)
+ {
+ ledcWrite(test_pwm_pins[i].channel, test_pwm_pins[i].level);
+ delay(150);
+ }
+ delay(300);
+ for (int i = 0; i < testPWMPinsCount; i++)
+ {
+ ledcWrite(test_pwm_pins[i].channel, test_pwm_pins[i].level / 2);
+ delay(150);
+ }
+ for (int i = 0; i < testDigitalPinsCount; i++)
+ {
+ if (digitalRead(test_digital_pins[i]) == LOW)
+ {
+
+ digitalWrite(test_digital_pins[i], HIGH);
+ }
+ else
+ {
+
+ digitalWrite(test_digital_pins[i], LOW);
+ }
+ }
+ delay(300);
+}
+
+void updateLeds()
+{
+ for (int i = 0; i < testDigitalPinsCount; i++)
+ {
+ digitalWrite(test_digital_pins[i], i == currentLed ? HIGH : LOW);
+ }
+}
+
+void readRotaryEncoderTask(void *pvParameters)
+{
+ for (;;)
+ { // Infinite loop
+ readRotaryEncoder();
+ vTaskDelay(pdMS_TO_TICKS(10)); // Delay for debouncing, adjust as needed
+ }
+}
+
+void readRotaryEncoder(void)
+{
+ byte i;
+ i = rotary.rotate();
+
+ if (i == 1)
+ {
+ currentLed = (currentLed - 1 + testDigitalPinsCount) % testDigitalPinsCount;
+ updateLeds();
+ Serial.println("CounterClockwise");
+ }
+
+ if (i == 2)
+ {
+ currentLed = (currentLed + 1) % testDigitalPinsCount;
+ updateLeds();
+ Serial.println("Clockwise");
+ }
+}
diff --git a/lib/libesp32/gpio_viewer/keywords.txt b/lib/libesp32/gpio_viewer/keywords.txt
new file mode 100644
index 000000000..17719d72c
--- /dev/null
+++ b/lib/libesp32/gpio_viewer/keywords.txt
@@ -0,0 +1,16 @@
+[Keywords]
+#######################################
+# Datatypes (KEYWORD1)
+#######################################
+byte
+boolean
+uint16_t
+int16_t
+int
+enum
+
+#######################################
+# Methods and Functions (KEYWORD2)
+#######################################
+begin
+
diff --git a/lib/libesp32/gpio_viewer/library.properties b/lib/libesp32/gpio_viewer/library.properties
new file mode 100644
index 000000000..c65ff1276
--- /dev/null
+++ b/lib/libesp32/gpio_viewer/library.properties
@@ -0,0 +1,11 @@
+name=GPIOViewer
+version=1.0.4
+author=The Last Outpost Workshop
+maintainer=The Last Outpost Workshop
+sentence=Web Application to view GPIO pins live!
+paragraph=Works ESP32
+category=Other
+keywords=keywords.txt
+url=https://github.com/thelastoutpostworkshop/gpio_viewer
+architectures=esp32
+depends=AsyncTCP
\ No newline at end of file
diff --git a/lib/libesp32/gpio_viewer/src/gpio_viewer.h b/lib/libesp32/gpio_viewer/src/gpio_viewer.h
new file mode 100644
index 000000000..6a4f1a58d
--- /dev/null
+++ b/lib/libesp32/gpio_viewer/src/gpio_viewer.h
@@ -0,0 +1,360 @@
+#ifndef _GPIOVIEWER_
+#define _GPIOVIEWER_
+#ifndef WEBSERVER_H
+// Compatiblity with the Wifi Manager if your using it in your project
+#include
+#endif
+#ifndef WiFi_h
+#include
+#endif
+#ifndef _ESPAsyncWebServer_H_
+#include